Download
1 / 10
100 likes | 143 Views
This project aims to enhance an existing robot platform by implementing new features like OS on Flash Card, I/O board, IMU, BPAM, and Adapter Board to optimize its functionality. The team is currently working on OS functions, BPAM layout, and I/O board integration, with plans to install new IMU and conduct tests for optimal performance.

E N D
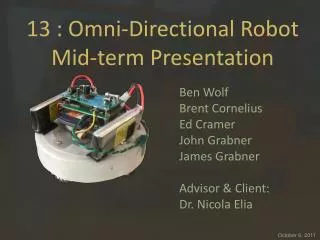
13 : Omni-Directional RobotMid-term Presentation Ben Wolf Brent Cornelius Ed Cramer John Grabner James Grabner Advisor & Client: Dr. Nicola Elia October 6, 2011
Project Goal • Repair/clean up existing robot platform • Finish unimplemented features • OS on Flash Card, reduced boot time • I/O board and IMU • BPAM(battery protection and monitoring) • Adapter Board(to pass through pin header for I/O board cable and help clean up chassis) • Document robot design and operation
Current Progress • OS - basic functions complete, experimenting with compressed file systems • BPAM - Layout complete, parts ordered • Adapter board - removed offset connector and replace with ribbon cable • I/O board - Purchased and tested for compatibility
I/O Board Cable Test • The PCM-MIO-G is tolerant of ‘irregular’ wiring • Reduces complexity and cost of the adapter board
What we need to do • OS • Add SquashFS to the kernel, compress root partition • Integrate I/O board with the sensor management interface • BPAM • Program microcontroller • Make PCB and install components • Adapter Board • Make PCB layout • Make PCB and install components • IMU • Purchase new IMU, mount to chassis, evaluate performance • Tests & Documentation
Success Criteria • OS • BPAM • Adapter board • Chasis Optimization • IMU • I/O
Success Criteria • Major components will be completed • Detailed analysis of results may suffer • Issues • Large learning curve for project • Documentation for previous robots is sparse • Difficult to test robot performance without reliable wheels • Legacy requirements negatively affect new designs
Questions ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?