Final Design
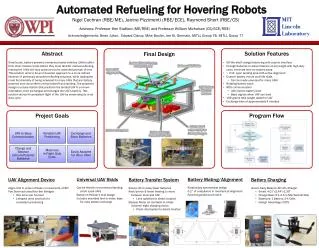
Automated Refueling for Hovering Robots. Nigel Cochran (RBE/ME), Janine Pizzimenti (RBE/ECE), Raymond Short (RBE/CS). Advisors: Professor Ken Stafford (ME/RBE) and Professor William Michalson (CS/ECE/RBE).

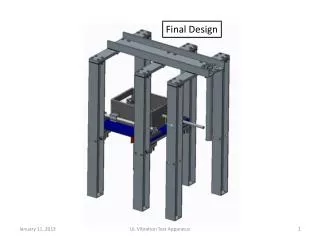
Final Design
E N D
Presentation Transcript
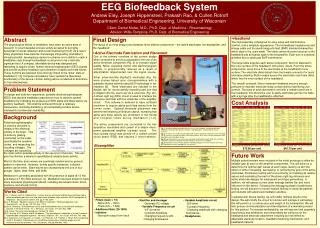
Automated Refueling for Hovering Robots • Nigel Cochran(RBE/ME), Janine Pizzimenti (RBE/ECE), Raymond Short (RBE/CS) • Advisors: Professor Ken Stafford (ME/RBE) and Professor William Michalson(CS/ECE/RBE) • Acknowledgements: Brian Julian, Edward Clancy, Mike Boulet, Joe St. Germain, MITLL Group 76, MITLL Group 77 Abstract Small-scale, battery-powered unmanned aerial vehicles (UAVs) suffer from short mission times before they must land for manual refueling, making the UAVs not truly autonomous for extended periods of time. This solution aims to be an innovative approach to a more refined iteration of previously proposed refueling solutions, while adding the novel functionality of being universal for many UAVs that are battery powered and can perform vertical takeoff and landing. The proposed design is a base station that positions the landed UAV to a known orientation, then exchanges and charges the UAV’s battery. This solution allows for persistent flight of the UAV by maximizing its in-air duty cycle. Final Design • Solution Features • Off-the-shelf charge/balancing with custom interface • Enough batteries to allow missions of any length with high duty cycle, minimize time for battery swap • ~ 2’x2’ open landing area with active alignment • Custom battery mount and UAV skids • Can be made universal for many UAVs • Rotating battery track • ROS communication • UAV reports battery level • Base signals when UAV can land • 109 grams total weight added to UAV • Exchange time of approximately 4 minutes Program Flow Project Goals Universal UAV Skids Can be fitted to most vertical landing, small scale UAVs Based on Pelican’s skid design Includes extended feet to widen base for easy battery exchange Battery Mating/Alignment Rotationally symmetrical design 0.2” of compliance in mechanical alignment Pyramid guided touch latch • Battery Transfer System • Scissor lift to raise/lower batteries • Rack/pinion & linear bearing to move between dock and UAV • Limit switches to detect location • Stepper Motor on turntable to rotate between eight charging docks • Photo interrupters to detect location • Battery Charging • Venom Easy Balance AC LiPo Charger • Small: 4.01”x2.44”x1.39” • Charge Rate: 0.1-4.5 A (Mechanical Dial) • Balances: 1 Battery, 2-4 Cells • Design Advantage: COTS • UAV Alignment Device • Aligns UAV in center of base in increments of 90° • Two Servo-actuated four-bar linkages • One servo per four-bar • L-shaped arms interlock for consistent positioning