Download
1 / 10
100 likes | 188 Views
Learn an advanced system identification approach for drift estimation, vital for phase calibration in high-performance instruments. Explore methods to measure, estimate, and compensate for drift and nonlinearity, avoiding small signal issues. Enhance drift estimation accuracy and reduce uncertainty using Weighted Least Squares (WLS) estimator.

E N D
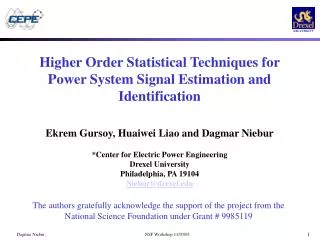
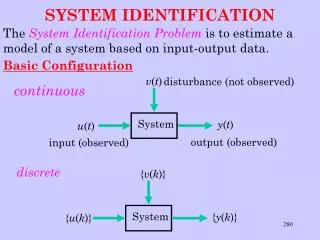
Vrije Universiteit Brussel Faculteit Ingenieurswetenschappen Vakgroep ELEC Pleinlaan 2, B-1050 Brussels, Belgium System Identification Approach applied to Drift Estimation. Frans Verbeyst Rik Pintelon Yves Rolain Johan Schoukens Tracy Clement
Motivation = phase calibration LSNA phase calibration requires a calibrated HPR requires a calibrated oscilloscope 2
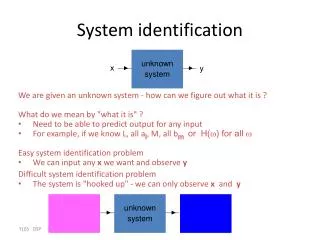
time base errors distortion tk k.Dt Sampling oscilloscopes “reality” vertical errors offset vertical cal plug-in measure,estimate,compensate drift nonlinearity avoid: usesmall signal jitter dynamics nose2noseEOS mismatches, connector saver measure and compensate 3
Enhanced drift estimation old: new: 4
var(re) (x10-6 V2) var(im) (x10-6 V2) freq (GHz) freq (GHz) im (mV) im (mV) im (mV) r(re,im) im (mV) freq (GHz) re (mV) re (mV) re (mV) re (mV) Circular complex noise ? 5000 realizations(jitter only, stdev 1 ps) 5
uncertainty on LS estimate construct WLS estimator relevant value of cost Covariance info: time - frequency Fourier transform, separate real and imag. part r(re,im) freq (GHz) 5000 realizations(jitter only, stdev 1 ps) Cov[y(t)] Cov[Y(w)] 6
Comparison K. Coakley and P. Hale, “Alignment of Noisy Signals,” IEEE Transactions on Instrumentation and Measurement,Vol. 50, No. 1, February 2001 (arbitrary units) Case of moderate jitter and small additive noise 7
trigger 2nd O/E sampling oscilloscope calibrated O/E impulse laser Ch1/3 y(t) (V) y(t) (V) t (ns) t (ns) Measurements 8
expected value WLS cost: 2.M.K - p p = 2.M + K M = K = 500 estimated drift (ps) naive LS expected value = 498500 ± 1997 actual value = 500346 enhanced LS enhanced WLS Measurements realization index uncertainty reduced by factor of 2 ! 9
Conclusions • Estimation of drift in presence of jitter • System identification framework • Outperforms any other published technique • Proper weighting: • relevant value of cost • decreased uncertainty on estimated drift: factor 2 10