Download
1 / 21
230 likes | 440 Views
In-Situ Robotics Granular Mechanics & Regolith Operations (GMRO) Lab. March 12, 2012 Phil Metzger, Ph.D., Senior Scientist Rob Mueller, Senior Technologist Surface Systems Office NASA Kennedy Space Center. Concepts for a Planetary Outpost.

E N D
In-Situ Robotics Granular Mechanics & Regolith Operations (GMRO) Lab March 12, 2012 Phil Metzger, Ph.D., Senior Scientist Rob Mueller, Senior Technologist Surface Systems Office NASA Kennedy Space Center
Propellant from the Moon will revolutionize our current space transportation approach Each Apollo mission utilized Earth-derived propellants (Saturn V liftoff mass = 2,962 tons) Schematic representation of the scale of an Earth launch system for scenarios to land an Apollo-size mission on the Moon, assuming various refueling depots and an in-space reusable transportation system. Note: Apollo stage height is scaled by estimated mass reduction due to ISRU refueling What if lunar lander was refueled on the Moon’s surface? 73% of Apollo mass (2,160 tons) Courtesy of Brad Blair, Colorado School of Mines Assume refueling at L1 and on Moon: 34% of mass (1,004 tons) Assume refueling at LEO, L1 and on Moon: 12% of mass (355 tons) +Reusable lander (268 tons) +Reusable upper stage & lander (119 tons)
ISRU Functions Resource & Site Characterization Regolith Excavation Site Preparation(roads, pads, berms, etc.) Regolith Transport Polar Volatile Extraction Mobile Transport of Oxygen Hoppers & Ascent Vehicles Habitats & Shelters Power Source Regolith Processing Surface Construction Construction feedstock (Solar Array or Nuclear Reactor) Oxygen & fuel for life support, fuel cells, & propulsion Power Generation Mission consumables Manufacturing feedstock Product Storage Surface Mobility Assets Manufacturing & Repair (Modified LSAM Cargo Lander)
ISRU is not Destination Specific Common Resources & Processes Support Multiple Robotic/Human Mission Destinations Possible Destinations Core Building Blocks Core Technologies Common Resources • Microchannel Adsorption • Constituent Freezing • Molecular Sieves • Water • Moon • Mars • Comets • Asteroids • Europa • Titan • Triton • Human Habitats • Atmosphere & Volatile Collection & Separation • Regolith Processing to Extract O2, Si, Metals • Water & Carbon Dioxide Processing • Fine-grained Regolith Excavation & Refining • Drilling • Volatile Furnaces & Fluidized Beds • 0-g & Surface Cryogenic Liquefaction, Storage, & Transfer • In-Situ Manufacture of Parts & Solar Cells Moon • Hydrogen Reduction • Carbothermal Reduction • Molten Oxide Electrolysis Mars & Phobos • Water Electrolysis • CO2 Electrolysis • Sabatier Reactor • RWGS Reactor • Methane Reformer • Microchannel Chem/thermal units • Carbon • Mars (atm) • Asteroids • Comets • Titan • Human Habitats Near Earth Asteroids & Extinct Comets • Scoopers/buckets • Conveyors/augers • No fluid drilling • Metals & Oxides • Moon • Mars • Asteroids • Thermal/Microwave Heaters • Heat Exchangers • Liquid Vaporizers Europa • Helium-3 • Moon • Jupiter • Saturn • Uranus • Neptune • O2 & Fuel Low Heatleak Tanks (0-g & reduced-g) • O2 Feed & Transfer Lines • O2/Fuel Couplings Titan
In-Situ Robotics Human Robotic Systems is a NASA technology development, looking to make humans in space (and on earth) more productive Key development areas: mobility, manipulation, human systems interaction Funded through NASA’s Game Changing Development Program within Space Technology
In-Situ Robotics Humans are more productive through the use of robots and human-robot teaming For this to work, the robots must be safe Developing safe robotics will have applications on earth Laying out roles is critical in human-robot teams Development in computing, sensing, batteries, algorithms, common tools that make this a good time for robotics to flourish
In-Situ Robotics Robots and human-robot teams needed across all phases of missions Preceding crew arrival Scouting; finding high value targets; ISRU Working with humans during a mission Apprentice role (dull, dangerous and dirty) Mobility; riding on, moving cargo, infrastructure After crew departure Preparation for next crew mission; moving assets, setting up infrastructure Performing exploration
In-Situ Robotics How robots are controlled varies on mission phase and operation mode Supervised from ground under time delay Direct crew interaction Riding on Working shoulder-to-shoulder In-direct crew interaction through teleoperation
HRS Approach HRS develops and matures prototype systems, subsystems, and component technologies in advance of key agency decision points Target TRL 5-6 prior to program infusion Orbital, asteroid, surface Re-use existing robots though… Improving functionality/fidelity of hardware and software Using in new or novel ways Build selective new robots
HRS Approach Work with human exploration architecture communities Build prototypes to answer open architecture questions being debated Build prototypes that that extend the thinking of the architecture community Leverage outside resources Past HRS development Other NASA robotics development Commercial partnerships Space Act Agreements Other agencies SBIR University research National Robotics Initiative
Current Product Lines Extreme Terrain Mobility (Mobility) Robonaut 2 technologies (Manipulation) Robotic Asteroid Mission Technologies (Manipulation) ISRU Resource Acquisition (Manipulation) Controlling Robots over Time Delay (Human Systems Interaction)
Granular Mechanics and Regolith Operations (GMRO) Laboratory projects Vibratory Impacting Percussive Excavator for Regolith (VIPER) Testing in Icy Regolith Simulant Quick Attach Umbilical for JSC’s Chariot Rocket Exhaust Analysis for Preservation of Apollo Landing Sites NIAC-funded In-Space Propulsion from Planetary Resources Regolith Advanced Surface Systems Operations Robot (RASSOR) with Gravity Offload System Portable Launch/Landing Pad and Hazard Field for Morpheus
RESOLVE Prospecting Mission Prototype(Applied Chemistry Lab)
Small Platform Excavation Devices http://go.nasa.gov/13lnqTN
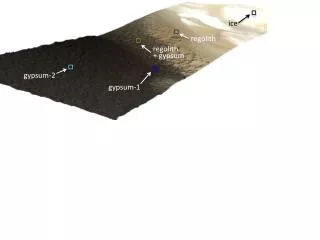
ISRU Field Testing In Hawaii PILOT & Bucket-drum Excavator The evolution of lunar water PILOT: Precursor ISRU Lunar Oxygen Testbed
Site Preparation Hardware & Operations Solar Concentrator w/ XYZ Table Multi-Agent Teaming – 3 Rovers w/ Blades TriDAR for Rover Tracking Resistive Sintering Device Solar Sintering & Sintered Pad Sintered Pad During Thruster Firing Sintered Pad Before Pad After Thruster Firing
ISRU Product and Utilization Hardware & Operations: “Dust to Thrust” Water Electrolysis Unit Liquid Oxygen & Methane Cart Fuel Cell LO2/CH4 Thruster Water Produced by Fuel Cell Hydride Hydrogen Storage


![Granular Synthesis [Thonk and Cecilia]](https://cdn3.slideserve.com/5452133/granular-synthesis-thonk-and-cecilia-dt.jpg)