Download
1 / 1
10 likes | 150 Views
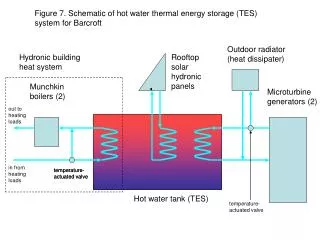
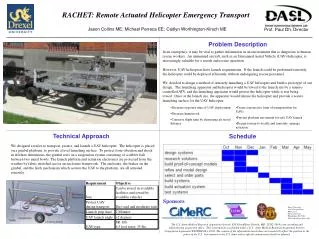
RACHET: Remote Actuated Helicopter Emergency Transport. Jason Collins ME; Michael Perreca EE; Caitlyn Worthington-Kirsch ME. Prof. Paul Oh, Director. Problem Description.

E N D
RACHET: Remote Actuated Helicopter Emergency Transport Jason Collins ME; Michael Perreca EE; Caitlyn Worthington-Kirsch ME Prof. Paul Oh, Director Problem Description In an emergency, it may be vital to gather information in an environment that is dangerous to human rescue workers. An unmanned aircraft, such as an Unmanned Aerial Vehicle (UAV) helicopter, is increasingly valuable for a search and rescue operation. However, UAV helicopters have launch requirements. If the launch could be performed remotely, the helicopter could be deployed efficiently without endangering rescue personnel. We decided to design a method of remotely launching a UAV helicopter and build a prototype of our design. The launching apparatus and helicopter would be towed to the launch site by a remote-controlled ATV, and the launching apparatus would protect the helicopter while it was being towed. Once at the launch site, the apparatus would release the helicopter and provide a secure launching surface for the UAV helicopter. • Decrease response time of UAV deployment • Decrease human risk • Conserve flight time by shortening air travel distance • Create a protective form of transportation for UAVs • Prevent platform movement for safe UAV launch • Design system to locally and remotely manage actuation Technical Approach Schedule We designed a trailer to transport, protect, and launch a UAV helicopter. The helicopter is placed on a gimbal platform, to provide a level launching surface. To protect from vibration and shock in all three dimensions, the gimbal rests on a suspension system consisting of a rubber ball between two metal bowls. The launch platform and actuation electronics are protected from the weather by fabric stretched across an enclosure framework. The enclosure, the brakes on the gimbal, and the latch mechanism which secures the UAV to the platform, are all actuated remotely. Sponsors Drexel University 3141 Chestnut StreetRoom 2-115Drexel UniversityPhiladelphia, PA 19104 Paul Oh paul@coe.drexel.edu The U.S. Army Medical Research Acquisition Activity, 820 ChandlStree Detrick, MD 21702-5014 is the awarding and administering acquisition office. This investigation was funded under a U.S. Army Medical Research Acquisition Activity; Cooperative Agreement W81XWH-06-1-0742. The content of the information herein does not necessarily reflect the position or the policy of the U.S. Government or the U.S. Army and no official endorsement should be inferred. 1