Download
1 / 57
590 likes | 1.4k Views
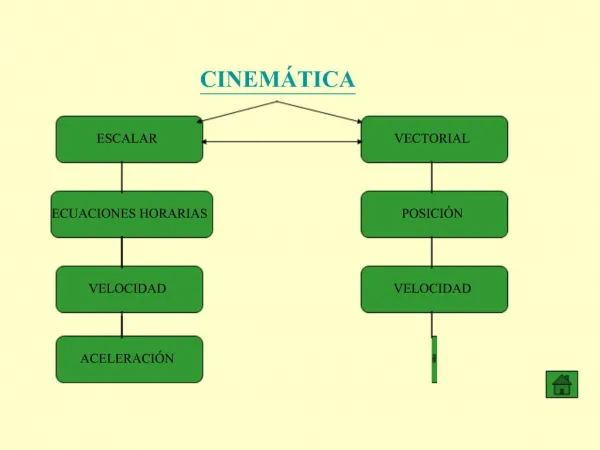
TIPOS Y ESTUDIO DE LOS PRINCIPALES MOVIMIENTOS (CINEMÁTICA). Unidad 12. Contenidos (1). 1.- Definición de Cinemática. 2.- Clasificación de los movimientos: 3.- Movimiento rectilíneo uniforme. 4.- Movimiento rectilíneo uniformemente acelerado. Caída libre. 5.- Composición de movimientos:

E N D
TIPOS Y ESTUDIO DE LOS PRINCIPALES MOVIMIENTOS (CINEMÁTICA) Unidad 12
Contenidos (1) 1.-Definición de Cinemática. 2.-Clasificación de los movimientos: 3.-Movimiento rectilíneo uniforme. 4.-Movimiento rectilíneo uniformemente acelerado. Caída libre. 5.-Composición de movimientos: 5.1.Dos movimientos MRU perpendiculares. 5.2.Tiro horizontal. 5.3.Tiro oblicuo.
Contenidos (2) 6.-Movimiento circular uniforme. 7.-Movimiento circular uniformemente acelerado.
Definición de Cinemática • Es la ciencia que estudia el movimiento sin preocuparse de las causas que lo producen, es decir, de las fuerzas. • Las únicas magnitudes que se usan son, pues, la posición y el tiempo y las derivadas de ambas, es decir, la velocidad y la aceleración. • Para medir el espacio definiremos un sistema de referencia y el vector posición r (r).
Tipos de movimientos • Según sean “”at “y “an” los movimientos se clasifican en: • Variación en “at” • at= 0; v = 0, es decir, la rapidez es constante Mov. Uniforme. • at = k; es decir, la rapidez varía proporcionalmente al tiempo Mov. Uniformemente acelerado. • at k; es decir, la rapidez no es directamente proporcional al tiempo Mov. Variado.
Tipos de movimientos (cont.) • Variación en “an” • an= 0 (porque R= ); no hay variación en la trayectoria Mov. Rectilíneo. • an 0 y R = k; la trayectoria es circular Mov. Circular. • an 0 y R k ; la trayectoria cambia continuamente de radio Mov. Curvilíneo.
Movimiento Rectilíneo UniformeM.R.U. Se cumple que a = 0at= 0an= 0
Ecuación del movimiento. • Si a =dv/dt = 0, significa que v es constante y no depende del tiempo (no cambia ni el módulo ni la dirección), ya que sólo la derivada de una constante da 0. • dv = a · dt. Integrando: v =∫dv = ∫a· dt = k • Ejemplo: Sea v = 3 i m/s a = 0 • Para obtener la posición se vuelve a integrar: r =∫ dr = ∫ v·dt = v· t + r0 Ecuación (r0= constante) vectorial • Ejemplo: Sea r = ∫ (3 i) m/s · dt = = (3t + k) ·i m
Ejercicio: Sea un movimiento cuya ecuación de velocidad es: v = (3 i + 4 j –6 k) m/s. Determinar la ecuación vectorial de la posición suponiendo que para t = 0 su posición es r0 = (2 i + k) m, ¿cuál será su posición en el instante t = 2 s? • r =∫dr = ∫v· dt = v· t + r0 == [(3 i + 4 j –6 k) · t + (2 i + k)] m r = [(3 t + 2) i + 4 t j + (–6 t + 1) k] m • r (t = 2 s) = [(3 · 2 + 2) i + 4 ·2 j + (–6 ·2 + 1) k] m= (8 i + 8 j– 11 k) m r (t = 2 s) = (8 i + 8 j – 11 k) m
Ecuación escalar del movimiento. • Como el movimiento es rectilíneo, lo más sencillo es situarlo en el eje de las “x” con lo que: • v = vx · i =k · i r = x · i = (x0 + vx · t) · i • Eliminando i de ambas miembros de las ecuaciones nos queda: vx = k ;x = x0 + vx· t • que se les denomina ecuaciones escalares.
Ecuaciones escalares del MRU en tres dimensiones. • Si no está situado en el eje “x” • v = vx · i +vy · j + vz · k en donde vx, vy,vz son tres constantes. • Entonces r = x · i + y · j + z · k == (x0 + vx · t) · i + (y0 + vy · t) · j + (z0 + vz · t) · k • Y las ecuaciones escalares quedarían: vx = k1 ; x = x0 + vx· t vy = k2 ; y = y0 + vy· t vz = k3 ; z = z0 + vz· t
Ejercicio: Escribir las ecuaciones escalares del movimiento anterior cuya ecuación de velocidad era:v = (3 i + 4 j –6 k) m/s, y su posición inicial venía determinada por r0 = (2 i + k) m. Ecuaciones escalares de velocidadde posición vx = 3 m/s ; x = (2+ 3 t) m vy = 4 m/s ; y = 4 t m Vz = –6 m/s ; z = (1 – 6 t) m
x(m) x = v · t + x0 x t x0 t(s) Representación gráfica x/t. • Al representar “x” frente a “t” se obtiene una recta cuya pendiente es “v” (v = tg ) y la ordenada en el origen es x0.
v(m/s) vx = k t(s) Representación gráfica v/t • Al representar “v” frente a “t” se obtiene una recta horizontal ya “v” es constante y no varía con “t”.
Movimiento Rectilíneo Uniformemente aceleradoM.R.U.A Se cumple que a = k · utat= k = aan= 0 Como la dirección no varía ut puede coincidir con cualquier vector unitario i, j o k.
Ecuaciones del movimiento. MRUA • a =dv/dt = ax · i significa que la v varía con el tiempo siempre al mismo ritmo. • dv = a dt. Integrando: • v =∫dv = ∫a· dt = a· t + v0 (v0 = constante) v = a· t + v0 • Para obtener la posición se vuelve a integrar: • r=∫dr = ∫v· dt = ∫(a· t + v0)· dt r= ½ a· t2 + v0· t +r0(r0= constante) • Si el movimiento transcurre a lo largo del eje “x” la ecuación vectorial se expresará como:r = x i = (½ ax · t2 + v0x· t + x0) i
Ejemplo: Sea un el movimiento definido por las siguientes constantesa = (5 i) m/s2 yv0= 3i m/s r0= 4i m. Determina las ecuaciones vectoriales de la velocidad y de la posición. • v =∫a· dt = ∫ (5 i) m/s2dt v = (5 m/s2 · t + 3 m/s)i • r = ∫v· dt = ∫ (5 m/s2 · t + 3 m/s)i · dt r = (5/2 m/s2· t2 + 3 m/s · t + 4 m) i
Ejercicio: Sea un movimiento cuya ecuación de velocidad es: v = (4· t +2 ) j m/s. Determinar la ecuación vectorial de la aceleración y de la posición. Suponiendo que para t = 0 su posición es r0 = 3 j m, ¿cuál será su posición en el instante t = 2 s? • a =dv/dt = 4 j m/s2 • r =∫dr = ∫v· dt = ∫(4· t + 2 ) jdt == (½ ·4 t2 + 2 t + 3) j m r = (2 t2 + 2 t + 3) j m r (t = 2 s) = [2 (2)2 + 2 ·2 + 3] j m == (8 + 4 + 3) j m r (t = 2 s) = 15 j m
Ecuaciones escalar del movimiento. • Como el movimiento es rectilíneo, lo situaremos en uno de los ejes, por ejemplo el “x” con lo que: • v = vx · i = at + v0= (ax· t + v0x)· i r = x · i = (x0 + v0x · t + ½ · ax· t2 ) · i • Eliminando el vector unitario i quedan las ecuaciones escalares: • vx = ax· t + v0x ; x = x0 + v0x · t + ½ ax · t2 • Si el movimiento sucede en el eje “y” vertical (caída libre) y tomando g = 9’8 m/s2, ay = –g (sentido hacia abajo) y las ecuaciones serán:vy = v0y– g· t ; y = y0 + v0y · t – ½ g · t2
Ecuación vx = f(x). Despejando “t en la ecuación vx = ax· t + v0x: vx –voxt = ———— ax y sustituyendo en x = x0 + v0x · t + ½ ax · t2 vx –vox 1 (vx –vox)2x = x0 +v0x ·——— + — ax ·———— ax 2 ax2 2 ax( x – x0) = 2 vx·vox – 2 vox2 + vx2+ vox2 – 2 vx·vox Despejando vx: vx2 = vox2 + 2 ax( x – x0)
Ejercicio: Sea el movimiento anterior cuya ecuacionesdel movimiento eran: a = 4 j m/s2;v = (4· t +2 ) j m/s;r = (2 t2 + 2 t + 3) j m. Determinar sus ecuaciones escalares. • vy = ay· t + v0y ; y = y0 + v0y · t + ½ ay · t2 • Comparando con la ecuación general observamos que las constantes del movimiento son: • ay = 4 m/s2 ; v0y = 2 m/s; y0 = 3 m • Y las ecuaciones escalares: • ay = 4 m/s2 • vy = (4 t + 2) m/s • y = (3+ 2 · t + 2 t2) m
Representación gráfica a/t aX (m/s2) • Al representar “a” frente a “t” se obtiene una recta horizontal ya “a” es constante y no varía con “t”. ax = k t(s)
Vx (m/s) vx = v0x + ax · t vx t v0x t(s) Representación gráfica v/t • Al representar “v” frente a “t” se obtiene una recta cuya pendiente es “ax” (ax = tg ) y la ordenada en el origen es v0x.
Vx= 0 x(m) x x0 t t(s) Representación gráfica x/t • Al representar “x” frente a “t” se obtiene una parábola cuya pendiente “v” varía con el tiempo y que vale 0 cuando el movimiento cambia de sentido (v = tg ) y la ordenada en el origen es x0.
ay (m/s2) Vy (m/s) t(s) vy (m/s) 0 1 2 3 4 5 5 12 m/s 10 3 s t(s) t(s) 2 4 t(s) (Continúa en la diapositiva siguiente) Ejercicio: Representar las gráficas ay/t, vy/t, y/t del movimiento anterior cuyas ecuaciones eran: a = 4 j m/s2;v = (4· t +2 ) j m/s; r = (½ ·4 t2 + 2 t + 3) j m . 2 6 10 14 18 tg = (12m/s)/3 s = 4 m/s2
y (m) t(s) y (m) 40 0 1 2 3 4 30 20 10 2 4 t(s) (Viene de la diapositiva anterior) Ejercicio: Representar las gráficas a/t, v/t, y/t del movimiento anterior cuyas ecuaciones eran: a = 4 j m/s2;v = (4· t +2 ) j m/s; r = (2 t2 + 2 t + 3) j m . 3 7 15 27 43
Composición de movimientos • Se basan en dos principios: • P. de Independencia: Cuando un móvil tiene dos movimientos simultáneos, su cambio de posición es independiente de considerarlos simultáneos o sucesivos. • P. de superposición: La posición, velocidad y aceleración vienen dados por la sumas vectorial de los movimientos parciales. • Si los movimientos transcurren en ejes distintos, se pueden considerar independientes. El tiempo es la única magnitud común para ambos.
Composición de dos movimientos uniformes perpendiculares. • La ecuación de velocidad será:v = vx · i + vy · j , siendo vx y vy constantes. • La ecuación de la posición será:r = x · i + y · j = (x0 + vx· t) · i + (y0 + vy· t) · j • En la práctica se tienen dos ecuaciones independientes con el “tiempo” común: • vx = k ; vy = k’ ; x = x0 + vx· t ; y = y0 + vy· t • Despejando “t” en una ecuación y sustituyendo en la otra se obtiene la ecuación de la trayectoria: • vyy = y0 + —– · (x – x0) Ec. de una recta vx
50 m Vbarca = (5 ·cos i + 5 ·sen j) m/s Vrío = –3 m/s i (Continúa en la diapositiva siguiente) Ejemplo: Se desea cruzar un río de 50 m de ancho con una barca llevando un velocidad de 5 m/s. ¿Que dirección deberá tomar para cruzar justo enfrente si la velocidad del agua es de 3 m/s y qué tiempo tardará en conseguirlo? Ecuaciones escalares de velocidad: Vx= 5 m/s · cos – 3 m/s ; Vy= 5 m/s · sen
(Viene de la diapositiva anterior) Ejemplo: Se desea cruzar un río de 50 m de ancho con una barca llevando un velocidad de 5 m/s. ¿Que dirección deberá tomar para cruzar justo enfrente si la velocidad del agua es de 3 m/s y qué tiempo tardará en conseguirlo? • Ecuaciones escalares de posición: • x = (5 m/s · cos – 3 m/s) · t • Para cruzar justo enfrente x = 0 • 0 = 5 m/s · cos – 3 m/s cos = 3/5 • =arc cos 3/5 =53’13 º • y = 5 m/s · sen · t = 5 m/s · 0,8 · t • Para y = 50 m; 50 m = 4 m/s · t • t = 12,5 s
Tiro parabólico • Es una composición de dos movimientos: un MRU en el eje horizontal (de las “x”) y un MRUA (caída libre) en el eje vertical (de las “y”). Ecuaciones del movimiento: a = – g · j ; v = v0x· i + (v0y – g · t) · j r = (x0 + v0x· t) · i + (y0 + v0y· t – ½ g · t2) · j v0x = v0· cos ; v0y = v0· sen Normalmente tomaremos x0 = 0 e y0 = h con lo que: v = v0 · cos · i + (v0· sen – g · t) · j r = v0·cos · t · i + (h+ v0·sen · t – ½ g · t2)· j
Tiro parabólico (continuación). Ecuaciones escalares(paramétricas): vx =v0· cos ; vy = v0· sen – g · t x = v0 · cos · t; y = h+ v0 · sen · t – ½ g · t2 Ecuación de la trayectoria (se obtiene eliminando “t” en las ecuaciones de posición): x x g x2t = ———– y = h+ v0 sen ———— – ————— v0 cos v0 cos 2 (v0 cos )2 g y = h + tg · x – —————— · x2 (parábola)2(v0 cos )2
Tiro horizontal (se cumple que: = 0 vx = v0 ; v 0y = 0 vy = – g · t) Se suele llamar “h” a la altura inicial (y0) Ecuaciones escalares(paramétricas): vx = v0 ; vy = – g · t x = v0· t ; y = h – ½ g · t2 Ecuación de la trayectoria: g y = h – –——· x2 2 v02 Tiempo de impacto con el suelo (y = 0): –—— 0 = h – ½ g · t2 t = 2 h/g
Tiro horizontal (continuación). Alcance(“x” para y = 0): –——x = v0 · 2 h/g Velocidad de impacto con el suelo: ——– ——–vx = v0 ; vy = – g · 2 h/g = – 2 g h –——–—v = vx2 + vy2 ; –——–———v = v02 + 2 g h
Ejemplo: Una persona lanza piedras horizontalmente desde lo alto de un acantilado de 25 m de altura. Si pretende que caigan a 30 m de la base del acantilado, calcula: a) la velocidad con que debe lanzar las piedras; b) el tiempo que tardan en caer éstas. a) De la ecuación del alcance [x = v0 · (2 h/g)½] despejamos “v0”: x 30 mv0 = ———— = ————————— = 13,28 m/s (2 h/g)½ (2 ·25 m/9,8 m/s2)½ b) De la ecuación [ x = v0· t] despejamos “t”: x 30 mt= —— = ————— = 2,26 sv0 13,28 m/s
Tiro oblicuo (para simplificar, vamos a suponer que se lanza desde el suelo: y0 = h = 0). Ecuaciones escalares(paramétricas): vx = v0· cos ; vy = v0· sen – g · t x = v0 · cos · t; y = v0 · sen · t – ½ g · t2 Ecuación de la trayectoria (se obtiene eliminando “t” en las ecuaciones de posición): x x g x2t = ———– y = v0 sen ———— – —————– v0 cos v0 cos 2 (v0 cos )2 g y = tg · x – —————— x2 2 (v0 cos )2
Tiro oblicuo Tiempo de impacto con el suelo (y = 0): • 0 = v0· sen · t – ½ g · t2 • Sacando factor común “t”: • 0 = (v0· sen – ½ g · t) · t • Cuyas soluciones son: t = 02 v0· sen t = ——————— g
Tiro oblicuo. Alcance (x para y = 0): • Sacando factor común “x” de la ecuación de la trayectoria e igualando a 0: • 0 = [tg – ½ g / (v0 cos )2 · x] · x • Cuyas soluciones son: x = 0x = 2 v02 · cos2 · tg /g = 2 v02 sen · cos /g • v02 · sen 2 x = —————— g • A igualdad de velocidad de lanzamiento el valor máximo se obtendrá cuando = 45º
Tiro oblicuo. Velocidad de impacto con el suelo vx =v0· cos ; vy = v0· sen – g · t • Sustituyendo “t” por ”2 v0 · sen / g” en vy que es la que varía se tendrá: vy = v0· sen – g · (2 v0 sen / g) vy = – v0· sen ; vx = v0· cos ———— —————————————v = vx2 + vy2 = (v0· cos )2 + (– v0· sen )2 ————————— ——v = v02(cos2 + sen2 ) = v02 = v0 • Es decir, siempre que se lance desde el suelo, la velocidad de caída es igual a la de lanzamiento.
Tiro oblicuo. Altura máxima (y para vy = 0). 0= v0· sen – g · t • De donde t = v0· sen / g (observa que es justo la mitad que el tiempo de impacto con el suelo) • Sustituyendo “t” por “v0· sen / g” en la ecuación de posición “y” y = v0·sen ·(v0·sen /g) – ½ g·(v0·sen / g)2= = v02· sen2 / g –½ (v02· sen2 / g) v02 · sen2 y = 2 g
Ejemplo: Un futbolista chuta hacia puerta con una velocidad de 15 m/s. Calcula: a) el alcance para un ángulo de tiro de 30º, 45º y 60 º; b) el tiempo que el balón permanece en el aire en cada tiro; c) la altura máxima en cada caso. a) v02 · sen 2 (15 m/s)2 · sen 60ºx(= 30º) = —————— = ————————— = 19,9 m g 9,8 m/s2 v02 · sen 2 (15 m/s)2 · sen 90ºx(= 45º) = —————— = ————————— = 23,0 m g 9,8 m/s2 v02 · sen 2 (15 m/s)2 · sen 120ºx(= 60º) = —————— = ————————— = 19,9 m g 9,8 m/s2 b) 2 v0· sen 2 · 15 m/s · sen 30º t (= 30º) = ————— = ————————— = 1,53 s g 9,8 m/s2 Análogamente t (= 45º) = 2,16 s; t (= 60º) = 2,65 s
(Viene de la diapositiva anterior) Ejemplo: Un futbolista chuta hacia puerta con una velocidad de 15 m/s. Calcula: a) el alcance para un ángulo de tiro de 30º, 45º y 60 º; b) el tiempo que el balón permanece en el aire en cada tiro; c) la altura máxima en cada caso. c) v02 · sen2 (15 m/s)2 · sen 2 30º y (= 30º) = —————— = ————————— = 2,87 m 2 g 2 · 9,8 m/s2 v02 · sen2 (15 m/s)2 · sen 2 45º y (= 45º) = —————— = ————————— = 5,74 m 2 g 2 · 9,8 m/s2 v02 · sen2 (15 m/s)2 · sen 2 60º y (= 60º) = —————— = ————————— = 8,61 m 2 g 2 · 9,8 m/s2
Movimientos circulares • El vector posición r va cambiando continuamente de dirección y sentido pero no así su módulo: r= R (radio) • Periodo (T): Es el tiempo que tarda en dar una vuelta completa. Se mide en segundos. • Frecuencia (): Es el número de vueltas que da por unidad de tiempo. Se mide en herzios = s–1. • T = 1/
Movimientos circulares (cont.). • Ángulo (): Se mide en rad. Es un vector perpendicular al plano del ángulo y sentido el del avance del tornillo. • Como 1 vuelta = 360º = 2 rad • La distancia recorrida (e) escalar toma el valor: • e = · R = · R • Existen otras dos magnitudes vectoriales que son la velocidad angular () y la aceleración angular () con definiciones similares a sus correspondientes lineales.
Movimientos circulares (cont.). • Velocidad angular (): • = d / d t • Tiene la misma dirección y sentido que y se mide en rad/s. • Aceleración angular (): • = d / d t • Tiene la misma dirección que y su mismo sentido si ésta aumenta y sentido contrario si disminuye. Se mide en rad/s2.
Movimiento Circular UniformeM.C.U. Se cumple que a 0at= 0 (v = cte) an= k (como v = cte R = cte)
Mov. Circular uniforme (MCU). • Como at = at= v / t= 0 v= k • La velocidad angulares constante: = · k • = =2 rad / T (s) = 2 rad · • Integrando: = ∫d =∫ ·d t = · t + 0 • En la práctica utilizaremos la ecuación escalar que es similar: • = · t + 0 • La celeridad “v” depende lógicamente del radio: • e · R v = —— = ——— = · R t t
Ejemplo: Las aspas de un molino giran con velocidad angular constante. Si dan 90 vueltas por minuto, calcula: a) la velocidad angular en radianes por segundo; b) la velocidad lineal de un punto de las aspas que se encuentra a 0,75 m del centro; c) el ángulo girado en 10 s. • a) 90 vueltas min 2 rad = ————— · ——— · ———— = 3 rad/s min 60 s vuelta • b)3 rad v = · R = ———— · 0,75 m = 7,1 m/s s • c)3 rad = · t = ———— · 10 s = 30 rad = 15 vueltas s
Movimiento Circular Uniformemente aceleradoM.C.U.A Se cumple que a 0at= kan k’