Download
1 / 43
430 likes | 598 Views
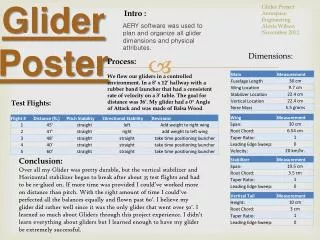
Team P14462, led by Kyle Ball and Matthew Douglas, conducted a comprehensive design review for a tethered glider system aimed at creating a small-scale, human-controlled flying model. The project focuses on maintaining maximum tension on the tether while sustaining stable flight paths and gathering crucial performance data. Key objectives include glider and base station analysis, feasibility assessments of engineering requirements, and implementation of a detailed work breakdown structure for project planning.

E N D
Single Line Tethered Glider Sub-System Level Design Review Team P14462 Kyle Ball Matthew Douglas William Charlock Jon Erbelding Paul Grossi Sajid Subhani
Agenda • Project Description Review • Engineering Requirements Review • Top 3 Concepts from Last Review • Concept Feasibility • Glider Analysis and Feasibility • Base Station Analysis and Feasibility • Project Planning • Work Breakdown Structure
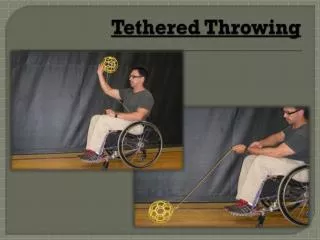
Project Description Review • Goal: Design, build, and test a tethered, small-scale, human-controlled glider. • Critical Project Objectives: • Maintain maximum tension on the tether • Sustaining horizontal and vertical flight paths • Measure and record tether tension and position • Understand the influential parameters for sustained, tethered, unpowered flight Glider Tether Base Station Operator w/ controller
Engineering Requirements Yellow: Major design Biege: DAQ Grey: Test flight White: System environment
Review of Top 3 System Concepts IMU with Single Axis Load Cell 3 Single Axis Load Cell 2 Potentiometers with Single Axis Load Cell
Choosing the Glider Bixler v1.1 EPO Foam Phoenix 2000 EPO Foam Wing span: 2 [m] Chord length: 0.3 [m] Mass: 0.98 [kg] Front mounted propeller Reinforced $150 • Wing span: 1.4 [m] • Chord length: 0.2 [m] • Mass: 0.65 [kg] • Middle mounted propeller • Only EPO Foam • $120
Choosing the Glider The smaller Bixler glider creates less tension for a larger operating range Able to operate with an affordable load cell
Flight Analysis Wind Speed: ~ 11 mph
Flight Analysis Wind Speed: ~ 22 mph
Flight Analysis Wind Speed: ~ 44 mph
Qualitative DOE • Slower wind speed: lower tension • Larger flight path radius: lower tension • Beta angle peaks: ~ 94-95° • Tension peaks: ~ 20 [m] tether length • Tension must be less than 5000 [N] (1100 lbs)
Quantitative DOE • Choosing flight configuration • Decision variables • Beta angle • Tether length • Flight path radius • Constraints • Maximum allowable tension • Observed wind speed
Bridle and Tether Setup Use a tension of 3000 lbs as an overestimate. Maximum allowable stress for Bixler glider: 30 MPa Bridle attached at two points on the fuselage causes structural failure at the wing root with 180 MPa
Ideal Bridle Location Analysis Optimum tether location: 0.51 m from root. Optimum tether angle: 54 deg from airplane
Wing Stress Analysis • Maximum stress: 15 MPa
Engineering Spec Considerations From application of Law of Cosines Solve for maximum allowable such that the resolution requirement is met, and load cell begins to move
3 Single-Axis Load Cells Concept 2
CAD Model • Created 3-D model of the system in SolidWorks • Works well when the ball joints are kept in tension as seen in Fig 1. • Ball joints fail when they are put into compression as seen in Fig 2. Fig. 2 Fig. 1
Base Station Equipment Phidgets 3140_0 – S Type Load Cell Bourns 3540S-1-103L Potentiometer
Incomplete Tasks from Phase 3 • Control and stability calculations • DAQ system development (setup, code) • Sensors analysis (calibration, implementation)
Work Breakdown Structure (10-12) • Paul: Tether and glider reinforcement and DOE • Jon: Finalize base station calculations, sensors and build materials • Kyle: Finalize base station calculations, sensors and build materials • Matt: Tether and glider reinforcement and DOE • Saj: Continue to develop DOE, create DOE algorithm, team management • Bill: Purchase glider, develop/modify LabVIEW for DAQ, sensors and build materials