Download
1 / 255
2.56k likes | 2.82k Views
The Department of Physics. Part IA Natural Sciences Tripos 2013/14. Rotational Mechanics & Special Relativity. Lecture 1. Point your browser at: www-teach.phy.cam.ac.uk/teaching/handouts.php. Course materials. This space is for your own notes. Text-book references:

E N D
The Department of Physics • Part IA Natural Sciences Tripos 2013/14 Rotational Mechanics & Special Relativity • Lecture 1 • Point your browser at: • www-teach.phy.cam.ac.uk/teaching/handouts.php
This space is for your own notes • Text-book references: • MO: Mansfield & O’Sullivan • TM: Tiplar & Mosca • You can also find these slides, in colour, on the Physics Teaching website: • www-teach.phy.cam.ac.uk/teaching/handouts.php • 7
5 • 6
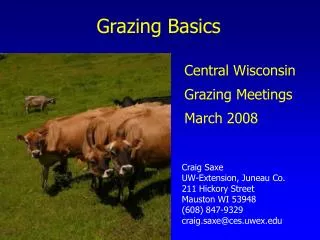
MO 128 • TM 149 The centre of mass • Suppose that we have a distribution of masses, all within one rigid body. Where should we put the fulcrum such that there is no rotation when suspended in a uniform gravitational field? This point is the ‘centre of weight’, but it also has special properties when there is no gravitational field and so is usually called the centre of mass. For the simple case of a uniform light rigid rod of length l connecting two point masses m1 and m2, it is obvious where the centre of mass must be:
y • l2 • l1 • m1 • C • m2 • Centre of mass • x • x1 • x2 • x0 We require that the total turning moment about C is zero, so we define its position to be such that m1l1 = m2l2. Since l1 = x0 – x1, and l2 = x2 – x0, we can write this as where M = m1+m2.
We can generalise this to a one-dimensional rigid body of N masses as follows: • For a three-dimensional rigid body, this expression must be satisfied in each dimension simultaneously, and we may write: • Now we can express this in vector form, writing the position vector of the centre of mass as R = (x0, y0, z0), and of each contributing mass as ri = (xi, yi, zi): • back
We are now in a position to find the centre of mass of a continuous body using integration rather than summation. Write the summation for R using δmi = mi: • Hence, for continuous bodies, we can replace the sum over i elements with an integral: • In 1 dimension, dm is l dl, where lis the mass per unit length and l is the length variable. • In 2 dimensions, dm is a da, where ais the mass per unit area and a is the area variable.
m2 • m1 • m3 • In 3 dimensions, dm is v dv, where vis the mass per unit volume and v is the volume variable. • We can also use the principle of superposition to work out what happens if the rigid body is ‘lumpy’. The centre of mass of a composite system of several lumps of mass can be calculated by first finding the centre of mass of each lump separately, and then finding the centre of mass of the whole considering each lump as a point mass at its individual respective centre of mass. • m2 • m1 • = • + • + • m3
For discrete masses: • For continuous bodies:
If the mass of the lamina is M, then • y • δx • x0 • b • x • x • h • Example 1: find the centre of mass of a lamina shaped like an isosceles triangle • Divide the lamina into thin strips, each having a width of δx. Take moments about the origin. The moment of the element shown is xδm, where δm is the mass of the element. The area of the element is 2yδx, and the area of the lamina is bh/2.
If the mass of the lamina is M, then • y • δx • x0 • b • x • x • Let δx tend to zero, and integrate to find the total moment. Then • h • Example 1: find the centre of mass of a lamina shaped like an isosceles triangle • Divide the lamina into thin strips, each having a width of δx. Take moments about the origin. The moment of the element shown is xδm, where δm is the mass of the element. The area of the element is 2yδx, and the area of the lamina is bh/2.
y • (m1+m2)g • l1 • l2 • m2 • m1 • m2g • m1g • x • x1 • x2 • x0 The lever balance • We find experimentally, that the lever is balanced only when m1l1 = m2l2
This is the case even though the sum of all the forces is zero wherever we put the fulcrum, i.e. • We conclude that a secondcondition is necessary for equilibrium, that is that “the sum of all the turning moments must be equal to zero”. • This is expressed in the law of the lever: • where li is the perpendicular distance and fiis the force.
The two conditions which must both be satisfied simultaneously for a body in static equilibrium are: • The vector sum of all the external forces acting on the body is exactly zero. • The sum of all the turning moments about an axis through any point is exactly zero. • MO 149 • TM 397
Circular motion • When a particle changes its position from P to P1 relative to a fixed point, O, we can describe the change in position using position vectors. The incremental vector δris added to the position vector, r, describing the position P, to find the new position P1: • This constitutes a complete description of the change in position. Note, however, that the • P1 • r + δr • δr • P • O • r
change has two parts: a change in the radial distance from O, and a change in the angle about an axis OQ perpendicular to the plane of the triangle OPP1: • Here, we shall be concerned with the rotational aspects of the motion, i.e. things to do with • Q • P1 • r + δr • δr • θ • P • O • r
changes in the angle, θ. Note that this always requires you to define an axis about which the rotation takes place, in this case the axis OQ. The rotation can be in two senses, clockwise and counter-clockwise (or anti-clockwise). We adopt the right-handed convention to describe the positive direction of the axis of rotation (as shown by the arrow from O to Q). When looking along the axis in the direction of the arrow, the positive rotation is clockwise. If you look along the axis in the other direction, such that the arrow is pointing directly at you, rotation is anticlockwise.
The angle is best measured in radians. If it is small, i.e. << 1 radian, we can describe the rotation by a vector, θ, through O and along OQ, in the direction of OQ and of magnitude equal to θ. • We can see that small rotations can be represented by vectors as follows: • Q • θ • θ • O
For very small angles, the segment of the circle AB (on the surface of the sphere of radius a centred on O) becomes approximately straight, and can therefore be represented by vector s of length a.Three small rotations can be performed such that the segments • form a closed vector triangle. The rotation axes are perpendicular to each rotation, so straight lines proportional to the angles also form a closed triangle, i.e. they add up as vectors. • Q • a2 • B • a3 • • s • a1 • A • a • O • θ
therefore describe the angular velocity by the vector • Using a similar argument, the angular acceleration may also be represented by a vector which points along the axis about which the angular acceleration is happening:
The moment of a force as a vector • We have already met the concept of the “moment of a force”, or the “turning moment”. We defined this as the force times the perpendicular distance of its point of action from the axis of rotation. We can represent the moment as a vector which, just as in the case of the angular velocity etc., points in a clockwise sense along the axis of rotation, and has a magnitude equal to the magnitude of the turning moment. • We consider a force, F, acting at point P which is described by position vector r from origin O:
G • F • Q • θ • r • G • P • O G = rF • Q • rsin(θ) • θ • rsin(θ) • Force Facts at point P, • which is at position • vector r from point O. • The moment of the force about O is G = Frsin() about the axis through O perpendicular to both r and F, clockwise looking in the direction of the arrow. • We define the moment vector G=rF
F • a • r1 • F • r2 • O • Example 2: find a vector expression for the moment of a couple. • A couple is a combination of two equal and opposite forces which are not in line with each other. • The forces act at position vectors r1 and r2 with respect to an arbitrary origin, O.
F • a • r1 • F • r2 • O • Example 2: find a vector expression for the moment of a couple. • A couple is a combination of two equal and opposite forces which are not in line with each other. • The forces act at position vectors r1 and r2 with respect to an arbitrary origin, O. • The moment of the couple is independent of the origin O, and depends only on the vector forces and the position vector of the point of action of one of them with respect to the other.
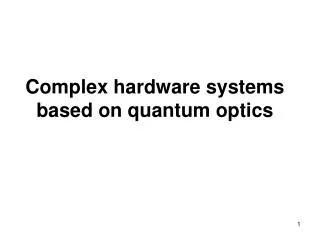
Angular acceleration of a rigid body • Newton’s second law gives us the relationship between the linear force applied to a body of mass m and its acceleration. We have seen that the rotational equivalent of the force, F, is the moment of the force (or torque), G, and the rotational equivalent of the linear acceleration, , is the angular acceleration, . Can we find an equivalent to Newton’s second law for rotational mechanics, and if so, what is the equivalent of the mass, m ?
Q • v = rω • ω • m • O • r • To answer this question, consider a particle of mass m rotating about an axis OQ: • Its linear speed is v = rω, but let us suppose that its speed is increasing, i.e. it has an acceleration in the direction of v. N2 tells us that there must therefore be a force acting on the particle in this
direction of magnitude F where • The magnitude of the moment of this force about OQ is directed along OQ. For this particle we may therefore write • Now we can consider a rigid body rotating about OQ as made up of the sum of N such elementary particles. Let the ith such particle be a distance ri from OQ and have a mass of mi. Then summing over the whole body, we have:
where Gext is the total external vector moment acting on the body about OQ. • If G is the rotational equivalent of F, and is the rotational equivalent of , then we must conclude that the rotational equivalent of the mass of the body is: • We call this quantity the moment of inertia, I, and then the rotational equivalent of N2 is
MO 154 • TM 293 Moment of inertia • In linear mechanics, the mass is measure of a body’s reluctance to change its state of linear motion. The larger the mass, the slower the rate of change of velocity for a given applied force. In rotational mechanics, the moment of inertia takes the place of the mass, and it is a measure of a body’s reluctance to change its state of angular motion. The larger the moment of inertia, the slower the rate of change of angular velocity for a given applied moment of a force. Like the mass, the moment of inertia is a scalar quantity, usually
given the symbol I. (Do not confuse this with the vector impulse, .) Thus, for a rigid body which can be thought of as being composed from N particles: • In terms of I, we can write the rotational equivalent of N2 as
flywheel • G • ω • motor • Example 3: an electric motor is attached to the axis of a massive flywheel of moment of inertia 70 kg m2. When an electric current is switched on, the motor applies a constant torque of 150 N m. What is the rotation rate of the flywheel after 30 s? • The torque causes an angular acceleration which increases the angular velocity of the flywheel.
flywheel • G • ω • motor • Example 3: an electric motor is attached to the axis of a massive flywheel of moment of inertia 70 kg m2. When an electric current is switched on, the motor applies a constant torque of 150 N m. What is the rotation rate of the flywheel after 30 s? • The torque causes an angular acceleration which increases the angular velocity of the flywheel.
Moments of inertia of continuous bodies • The expression we have obtained for the moment of inertia, I, of a rigid body involves a summation over N elemental mass contributions: • For continuous bodies, it is more convenient to use an integral form. We imagine that the body is divided into a very large number of very small masses, δm, all joined together to make up the whole. A particular one is at distance r from the axis, so it contributes an amount δI to the total
where δI = r2δm. Now go to the limit as δm tends to zero, and integrate over all the contributions to get the total moment of inertia, thus: • The trick in applying this expression is often to express dm in terms of the distance variable (r) using the density. You should also take advantage of the spatial symmetry of the problem to simplify the expression that you must integrate. Some examples follow.
rod • δx • x • l • Example 4: find an expression for the moment of inertia of a rod of length l about an axis through one end perpendicular to the rod. • Let the rod’s density be per unit length. Consider an element of the rod, length δx, at distance x from one end. The mass of the element is δm = δx. The contribution to the total moment of inertia from this element is δI, given by:
Example 4: find an expression for the moment of inertia of a rod of length l about an axis through one end perpendicular to the rod. • Let the rod’s density be per unit length. Consider an element of the rod, length δx, at distance x from one end. The mass of the element is δm = δx. The contribution to the total moment of inertia from this element is δI, given by: • rod • δx • x • l
Example 5: find an expression for the moment of inertia of a solid disc of mass M and radius a about an axis through its centre perpendicular to the plane of the disc. • Let the disc have a surface density of per unit area. Consider a radial element of the disc at radius r, thickness δr. This has mass δm which is equal to 2rδr. It makes a contribution, δI, to the total moment of inertia given by: • r • a • δr
Example 5: find an expression for the moment of inertia of a solid disc of mass M and radius a about an axis through its centre perpendicular to the plane of the disc. • Let the disc have a surface density of per unit area. Consider a radial element of the disc at radius r, thickness δr. This has mass δm which is equal to 2rδr. It makes a contribution, δI, to the total moment of inertia given by: • r • a • δr • Note that this formula also applies to a cylinder.
ri • mi • Ri Parallel axes theorem • This theorem allows us to obtain the moment of inertia, I, of a rigid body about any axis, AB, parallel to an axis, OP, through the centre of mass about which the moment of inertia of the body is I0. • Consider the contribution from the element mi: • B • rigid body • P • centre of mass • a • MO 155 • TM 297 • O • A
zero for • centre of mass • Let I be the moment of inertia about axis AB. • Let I0 be the moment of inertia about an axis, OP, parallel to AB and through the centre of mass.
Let I be the moment of inertia about axis AB. • Let I0 be the moment of inertia about an axis, OP, parallel to AB and through the centre of mass.
B • P • a = l/2 • A • O • Example 6: find an expression for the moment of inertia of a rod of length l and mass M about an axis through its centre perpendicular to the rod. • Let the moment of inertia about the axis through the centre be I0. We have already calculated the moment of inertia, I, about a parallel axis through one end of a rod to be Ml2/3. Thus:
Example 6: find an expression for the moment of inertia of a rod of length l and mass M about an axis through its centre perpendicular to the rod. • Let the moment of inertia about the axis through the centre be I0. We have already calculated the moment of inertia, I, about a parallel axis through one end of a rod to be Ml2/3. Thus: • B • P • a = l/2 • A • O
z • y • ri • mi • x Perpendicular axes theorem • This is another useful theorem which relates the moments of inertia about three perpendicular axes through any point in a lamina, one of which is perpendicular to the plane of the lamina. • Consider the contribution by an elemental mass mi:
Let the lamina be in the xy plane. Then the moment of inertia about the z axis is
Example 7: find an expression for the moment of inertia of a disc of radius a and mass M about an axis through its centre in the plane of the disc. • We have already found the moment of inertia of the disc about the z axis to be Ma2/2. Thus • z • a • y • x
z • a • y • x • Example 7: find an expression for the moment of inertia of a disc of radius a and mass M about an axis through its centre in the plane of the disc. • We have already found the moment of inertia of the disc about the z axis to be Ma2/2. Thus
Sounds of Pulsars • 0329+54 P=0.71452s • 0833-45 P=0.089s • 0531+21 P=0.033s • 0437-4715 P=0.00575s • 1937+21 P=0.00167s • Single pulses are usually very variable !