Download
1 / 24
250 likes | 360 Views
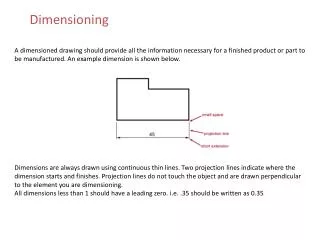
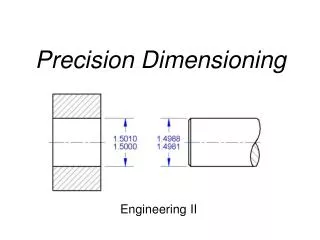
This report details the progress on the Irregular Object Dimensioning System, focusing on its implementation in sorting facilities. It outlines current specifications, challenges faced with dimensioning irregularly shaped objects, and future plans for algorithm improvements. Key components include advanced laser measuring heads, camera systems, and image processing algorithms aimed at minimizing errors in dimensions for optimized cargo space utilization. The project's innovations not only aim to increase profits for shipping companies by saving space but also establish a reliable "Irregular Approval" guideline for the industry.

E N D
Advisor: Professor Neal Anderson Michael Baccari Peter Bian Michael Coughlin Avi Noy Irregular Object Dimensioning System
Agenda • Background • MDR Specification • Progress Report • Challenges • Future Plans • Summary
Background • Sorting facilities’ conveyer belts. • Components of sort system: Photo eye, laser measuring heads, set of 6 line-scan cameras.
Background (Cont’d) • Irregularly shaped objects • Current issues with the dimensioning component. • “The irregular approval.”
Background (Cont’d) • Dimensions used for storage area on cargo planes • Minimize cuboidal volume of irregularly shaped objects • Increases profits • Save cargo space • “Irregular Approval” • Guideline test for major shipping companies • Half inch margin error • “Sputnik” test
MDR Specification • Software Progress • Demo of algorithms for dimensional reconstruction from simulated laser data input • Demo of image processing algorithm with basic edge detection from camera • Working Hardware Components • Conveyor Belt • 2 laser measuring heads (LMS 200) • 2 Cameras • LED Light Sources • Photo Eye • Research • Multiplexing • Image Processing • Depth Maps • Quantifiable Requirement Specifications • Irregular Approval • Proposed System Improvement
Progress Report (Cont’d) • Hardware Components • LMS – Laser Measuring Heads • One 2-D camera • Two LEDs • Photoeye • Conveyor belt
Progress Report (Cont’d) • LMS Setup
Progress Report (Cont’d) • LMS Initialization
Progress Report (Cont’d) • 2-D Camera
Progress Report (Cont’d) • LEDs
Progress Report (Cont’d) • Photoeye
Progress Report (Cont’d) • Photoeye (Cont’d) • IR Led transmitter – Hamamatsu part #L2690-02 • Forward current IF = 50mA • R = VCC/IF = 5/50mA = 100Ω • Digital output photo IC – Hamamatsu part #L6289 • Photodiode • Schmitt trigger circuit • Output resistor • RL = 1.2kΩ • Ccoupling = 0.01uF
Progress Report (Cont’d) • Photoeye – Results
Progress Report (Cont’d) • Conveyer belt demo video
Progress Report (Cont’d) • Image processing algorithm • SUSAN (Smallest Univalue Segment assimilating Nucleus) Principle
Progress Report (Cont’d) • Image processing algorithm demo
Progress Report (Cont’d) • Laser edge detection and dimensional algorithm
Challenges • Blind spots
Challenges (Cont’d) • Current algorithm • 2 dimensional axis • No algorithm for 3 dimensional axis • All edges and protrusions mapped out for irregular object • Multiplexing cameras with LMS heads
Future Plans • Creation of 3 dimensional axis algorithm • Implementation • Multiplexing of two sets of data • Execution of new dimensioning algorithm • Possible improvement of edge detection for LMS and cameras • Construction of redesigned control box
Summary • MDR Specification • Improve accuracy of dimensioning of irregularly shaped objects • “Irregular Approval” • Half inch margin of error