The Cactus Code: A Problem Solving Environment for the Grid
The Cactus Code is a collaborative environment for developing high-performance simulations with modular components. Thorns provide extensible APIs for Fortran, C, C++, Java, Perl, and Python. The architecture includes Flesh for I/O and boundary conditions, and thorns can be configured through Cactus Configuration Language files.

The Cactus Code: A Problem Solving Environment for the Grid
E N D
Presentation Transcript
The Cactus Code: A Problem Solving Environment for the Grid Gabrielle Allen, Gerd Lanfermann Max Planck Institute for Gravitational Physics
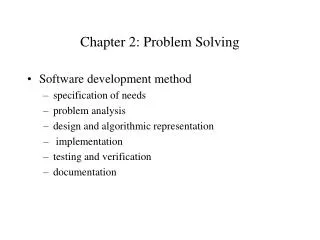
What is Cactus? Cactus is a freely available, modular, portable and manageable environment for collaboratively developing parallel, high- performance multidimensional simulations
Cactus remote steering Plug-In “Thorns” (modules) extensibleAPIs Fortran/C/C++ Java/Perl/Python ANSI C parameters driver scheduling equations of state Core “Flesh” input/output errorhandling black holes interpolation makesystem boundaryconditions gridvariables SOR solver coordinates multigrid wave evolvers
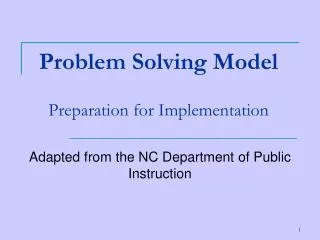
Cactus Architecture Cactus Thorns Computational Toolkit Toolkit Toolkit Flesh Make Configure CST Operating Systems Irix SuperUX Linux Unicos HP-UX Solaris OSF NT AIX
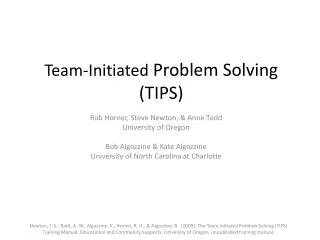
Thorn Architecture Thorn Parameter Files and Testsuites Configuration Files ???? Source Code ???? Fortran Routines C Routines C++ Routines Documentation! Make Information
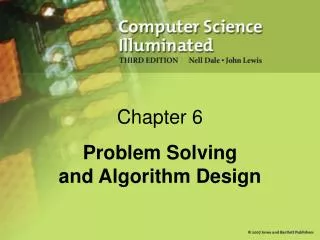
State of the Art Numerical Relativity Simulations Albert Einstein Institute Washington University Viz: Werner Benger
Current Version Cactus 4.0 • Cactus 4.0 beta 1 released September 1999 • Flesh and many thorns distributed under GNU GPL • Currently: Cactus 4.0 beta 8 • Supported Architectures: • SGI Origin • SGI 32/64 • Cray T3E • Dec Alpha • Intel Linux IA32/IA64 • Windows NT • HP Exemplar • IBM SP2 • Sun Solaris • Hitachi SR8000-F • NEC SX-5 • Mac Linux
Flesh API • Abstract Flesh API for • Driver functions (storage, communication) • Interpolation • Reduction • IO, checkpointing • Coordinates • etc, etc • In general, thorns overload or register their capabilities with the Flesh, agreeing to provide a function with the correct interface • e.g. CCTK_SyncGroup (overloaded) • e.g. CCTK_OutputVar(“variable”,“IOASCII”) (registered)
Computational Toolkit Application Toolkit Application Toolkit Computational Toolkit Flesh CCTK_(…) CST Application View
Parallelism in Cactus • Cactus is designed around a distributed memory model. Each thorn is passed a section of the global grid. • The actual parallel driver (implemented in a thorn) can use whatever method it likes to decompose the grid across processors and exchange ghost zone information - each thorn is presented with a standard interface, independent of the driver. • Standard driver distributed with Cactus (PUGH) is for a parallel unigrid and uses MPI for the communication layer • PUGH can do custom processor decomposition and static load balancing
Configuration files • Each thorn provides 3 configuration files, detailing its interface with the Flesh and with other thorns • CCL: Cactus Configuration Language • interface.ccl • implementation, this thorn’s variables and variables used from other thorns • param.ccl • this thorn’s parameters, parameters used and extended from other thorns • schedule.ccl • when and how this thorn’s routines should be executed, optionally with respect to routines from other thorns
CactusBase Boundary, IOUtil, IOBasic, CartGrid3D, IOASCII, Time CactusBench BenchADM CactusExample WaveToy1DF77, WaveToy2DF77 CactusElliptic EllBase, EllPETSc, EllSOR, EllTest CactusPUGH Interp, PUGH, PUGHSlab CactusPUGHIO IOFlexIO, IOHDF5, IsoSurfacer CactusTest TestArrays, TestCoordinates, TestInclude1, TestInclude2, TestComplex, TestInterp CactusWave IDScalarWave, IDScalarWaveC, IDScalarWaveCXX, WaveBinarySource, WaveToyC, WaveToyCXX, WaveToyF77, WaveToyF90, WaveToyFreeF90 external IEEEIO, RemoteIO, TCPXX Cactus Computational Toolkit
Cactus can make use of ... Autopilot FlexIO (IEEEIO/HDF5) Globus GrACE HDF5 MPI Panda IO PAPI PETSc
AutoPilot • Dynamic performance instrumentation, on-the-fly performance data reduction, resource management algorithms, real-time adaptive control mechanism • Cactus provides a mechanism to register timers, and Autopilot is currently being integrated. http://www-pablo.cs.uiuc.edu/Project/Autopilot/AutopilotOverview.htm http://www.cactuscode.org/Documentation/HOWTO/Performance-HOWTO http://www.cactuscode.org/Projects.html
FlexIO (IEEEIO) IEEEIO readers for: Amira AVS IDL LCA Vision NAG Explorer • FlexIO is a compact multi-platform API for storing multidimensional scientific data. It hides the differences between underlying file formats including HDF5 and IEEEIO. • IEEEIO is a compact library for storing multidimensional scientific data in a binary format that can be transported between different computer systems. • Cactus thorn CactusPUGHIO/IOFlexIO outputs multidimensional data using the IEEEIO library. http://zeus.ncsa.uiuc.edu/~jshalf/FlexIO/ http://zeus.ncsa.uiuc.edu/~jshalf/FlexIO/IEEEIO.html http://www.cactuscode.org/Documentation/HOWTO/Visualization-HOWTO Documentation in thorns CactusBase/IOUtil and CactusPUGHIO/IEEEIO
Globus Toolkit • Globus Toolkit: Enables application of Grid concepts to scientific and engineering computing • Cactus (with the default MPI driver) compiles with Globus (1.0/1.1), using MPICH-G. • Cactus can then be run using RSL scripts as usual with Globus The Grid: Dependable, consistent, pervasive access to [high-end] resources Collaborative engineering Browsing of remote datasets Use of remote software Data-intensive computing Very large-scale simulation Large-scale parameter studies http://www.globus.org/ http://www.cactuscode.org/Documentation/HOWTO/Globus-HOWTO http://jean-luc.aei-potsdam.mpg.de/SC98/
HDF5 • Hierarchical data format for scientific data management (I/O libraries and tools). • Future standard, overcomes limitations of HDF4. Simple but powerful model, includes hyperslabs, datatype conversion, parallel IO. • Used for 2D/3D output in Computational Toolkit (CactusPUGHIO/IOHDF5) • Much development in (remote) visualization and steering with Cactus uses HDF5 • Readers for Amira, OpenDX, (LCA Vision). http://hdf.ncsa.uiuc.edu/HDF5/ http://www.CactusCode.org/Documentation/UsersGuide_html/node15.html http://www.cactuscode.org/Documentation/HOWTO/Visualization-HOWTO Documentation in thorns CactusBase/IOUtil and CactusPUGHIO/IOHDF5
Panda IO • Data management techniques for I/O intensive applications in high-performance scientific computing. • Simpler, more abstract interfaces, efficient layout alternatives for multidimensional arrays, high performance array I/O operations. • Thorn IOPanda http://cdr.cs.uiuc.edu/panda/ http://www.cactuscode.org/Workshops/NCSA99/talk13/sld003.htm
PAPI • Standard API for accessing the hardware performance counters on most microprocessors. • Useful for tuning, optimisation, debugging, benchmarking, etc. • Java GUI available for monitoring the metrics • Cactus thorn CactusPerformance/PAPI http://icl.cs.utk.edu/projects/papi/ http://www.cactuscode.org/Documentation/HOWTO/Performance-HOWTO http://www.cactuscode.org/Projects.html
Grid-Enabled Cactus • Cactus and its ancestor codes have been using Grid infrastructure since 1993 • Support for Grid computing was part of the design requirements for Cactus 4.0 (experiences with Cactus 3) • Cactus compiles “out-of-the-box” with Globus [using globus device of MPICH-G(2)] • Design of Cactus means that applications are unaware of the underlying machine/s that the simulation is running on … applications become trivially Grid-enabled • Infrastructure thorns (I/O, driver layers) can be enhanced to make most effective use of the underlying Grid architecture
Grid Experiments • SC93 • remote CM-5 simulation with live viz in CAVE • SC95 • Heroic I-Way experiments leads to development of Globus. Cornell SP-2, Power Challenge, with live viz in San Diego CAVE • SC97 • Garching 512 node T3E, launched, controlled, visualized in San Jose • SC98 • HPC Challenge. SDSC, ZIB, and Garching T3E compute collision of 2 Neutron Stars, controlled from Orlando • SC99 • Colliding Black Holes using Garching, ZIB T3E’s, with remote collaborative interaction and viz at ANL and NCSA booths • 2000 • Single simulation LANL, NCSA, NERSC, SDSC, ZIB, Garching, … • Dynamic distributed computing … spawning new simulations
Cactus + Globus Cactus Application Thorns Distribution information hidden from programmer Initial data, Evolution, Analysis, etc Grid Aware Application Thorns Drivers for parallelism, IO, communication, data mapping PUGH: parallelism via MPI (MPICH-G2, grid enabled message passing library) Single Proc Standard MPI Grid Enabled Communication Library MPICH-G2 implementation of MPI, can run MPI programs across heterogeneous computing resources
Grand Picture Viz of data from previous simulations in SF café Remote steering and monitoring from airport Remote Viz in St Louis Remote Viz and steering from Berlin DataGrid/DPSS Downsampling IsoSurfaces http HDF5 T3E: Garching Origin: NCSA Globus Simulations launched from Cactus Portal Grid enabled Cactus runs on distributed machines
Grid Related Projects • ASC: Astrophysics Simulation Collaboratory • NSF Funded (WashU, Rutgers, Argonne, U. Chicago, NCSA) • Collaboratory tools, Cactus Portal • Currently setting up testbed (Globus, Cactus, Portal at NCSA, ZIB, AEI) • E-Grid: European Grid Forum • Members from academic and government institutions, computer centers and industry • Test application: Cactus+Globus • Currently working towards distributed computing project for SC2000 (spawning Cactus jobs to new machines) • GrADs: Grid Application Development Software • NSF Funded (Rice, NCSA, U. Illinois, UCSD, U. Chicago, U. Indiana...) • Application driver for grid software
Grid Related Projects (2) • Grid Forum • Experiments • Transparency appearances • Distributed Runs • AEI, Argonne, U. Chicago • Working towards running on several computers, 1000’s of processors (different processors, memories, OSs, resource management, varied networks, bandwidths and latencies) • TIKSL • German DFN funded: AEI, ZIB, Garching • Remote online and offline visualization, remote steering/monitoring • Cactus Team • Dynamic distributed computing … • Testing of alternative communication protocols … MPI, PVM, SHMEM, pthreads, OpenMP, Corba, RDMA, ...
Dynamic Distributed Computing • Make use of • Running with management tools such as Condor, Entropia, etc. • Scripting thorns (management, launching new jobs, etc) • Dynamic use of MDS for finding available resources • Applications • Portal for simulation launching and management • Intelligent parameter surveys (Cactus control thorn) • Spawning off independent jobs to new machines e.g. analysis tasks • Dynamic staging … seeking out and moving to faster/larger/cheaper machines as they become available (Cactus worm) • Dynamic load balancing (e.g. inhomogeneous loads, multiple grids)
Remote Visualization OpenDX OpenDX Amira Contourplots (download) LCAVision IsoSurfaces and Geodesics Grid FunctionsStreaming HDF5 Amira
Remote Visualization • Streaming data from Cactus simulation to viz client • Clients: OpenDX, Amira, LCA Vision, ... • Protocols • Proprietary: • Isosurfaces, geodesics • HTTP: • Parameters, xgraph data, JPegs • Streaming HDF5: • HDF5 provides downsampling and hyperslabbing • all above data, and all possible HDF5 data (e.g. 2D/3D) • two different technologies • Streaming Virtual File Driver (I/O rerouted over network stream) • XML-wrapper (HDF5 calls wrapped and translated into XML)
Remote Visualization (2) • Clients • Proprietary: • Amira • HTTP: • Any browser (+ xgraph helper application) • HDF5: • Any HDF5 aware application • h5dump • Amira • OpenDX • LCA Vision (soon) • XML: • Any XML aware application • Perl/Tk GUI • Future browsers (need XSL-Stylesheets)
Open source, (free), multiplatform, large active development community, easy to program Reads HDF5 (Cactus) data from file or remotely streamed from Cactus Simple GUI, select different hyperslabs from 3D data Also support for streamed ASCII data from Cactus OpenDX
Remote Visualization - Issues • Parallel streaming • Cactus can do this, but readers not yet available on the client side • Handling of port numbers • clients currently have no method for finding the port number that Cactus is using for streaming • development of external meta-data server needed (ASC/TIKSL) • Generic protocols • Data server • Cactus should pass data to a separate server that will handle multiple clients without interfering with simulation • TIKSL provides middleware (streaming HDF5) to implement this • Output parameters for each client
Remote Steering Any Viz Client HTTP XML Remote Viz data HDF5 Amira Remote Viz data
Remote Steering • Stream parameters from Cactus simulation to remote client, which changes parameters (GUI, command line, viz tool), and streams them back to Cactus where they change the state of the simulation. • Cactus has a special STEERABLE tag for parameters, indicating it makes sense to change them during a simulation, and there is support for them to be changed. • Example: IO parameters, frequency, fields • Current protocols: • XML (HDF5) to standalone GUI • HDF5 to viz tools (Amira) • HTTP to Web browser (HTML forms)
Thorn which allows simulation to act as a web server Connect to simulation from any browser Monitor run: parameters, basic visualization, ... Change steerable parameters See running example at www.CactusCode.org Wireless remote viz, monitoring and steering Thorn http
Remote Steering - Issues • Same kinds of problems as remote visualization • generic protocols • handling of port numbers • broadcasting of active Cactus simulations • Security • Logins • Who can change parameters? • Lots of issues still to resolve ...
Viz Client (Amira) HDF5VFD DataGrid (Globus) HTTP DPSS FTP Web Server FTP Server DPSS Server Remote Offline Visualization Viz in Berlin VisualizationClient Downsampling, hyperslabs Only what is needed Remote Data Server 4TB at NCSA
Remote Offline Visualization • Accessing remote data for local visualization • Should allow downsampling, hyperslabbing, etc. • Access via DPSS is working (TIKSL) • Waiting for DataGrid support for HTTP and FTP to remove dependency on the DPSS file systems.
More Information ... • Web site: www.CactusCode.org • Users Guide • Development projects • HOWTOs • References for common questions, includes HOWTO-QuickStart • Tutorials • Help desk • cactusmaint@cactuscode.org • Bug tracking • Mailing lists