Download
1 / 1
20 likes | 215 Views
Analysis and Modelling of Sea-Surface Doppler Spectra. Franco Fois 1 , Peter Hoogeboom 1 , Francois Le Chevalier 1 , Ad Stoffelen 2. F.Fois@tudelft.nl. OS11C-1669 .

E N D
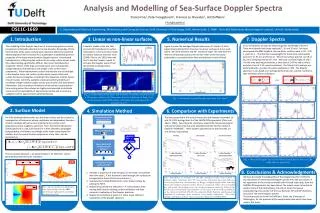
Analysis and Modelling of Sea-Surface Doppler Spectra Franco Fois1, Peter Hoogeboom1, Francois Le Chevalier1, Ad Stoffelen2 F.Fois@tudelft.nl OS11C-1669 1. Department of Electrical Engineering, Mathematics and Computer Science, Delft University of Technology, Delft, Netherlands; 2. KNMI - Koninklijk Nederlands Meteorologisch Instituut, Utrecht, Netherlands 1. Introduction 3. Linear vs non-linear surfaces 5. Numerical Results 7. Doppler Spectra In our simulations we used an electromagnetic wavelength 0.0214 m. Three wind speeds have been analyzed (7, 10 and 12 m/s). For these wind speeds the RMS height of the non-linear surfaces were 1.14λ , 2.33 λ and 3.35 λ . The dominant wavelengths for these three wind speeds were 44.7 m, 91.2 m and 131.4 m. We set the surface spectral cut-off at 5Ko (min. sampling interval of λ /12). We used a surface length of 150 λ . For the time evolving simulations, a time step of 1.43 ms and a surface evolution time of 5.12 s were considered. The Monte Carlo analysis was performed with a number of surface realizations =100. The Doppler spectrum is calculated as an average performed over a certain number of time evolving surface realizations A realistic model of the sea, that accounts for hydrodynamic surface interactions, is the non-linear model for surface waves by Creamer et ali [1989]. Rino et ali [ 1991] were the first to use the Creamer model to simulate the Doppler spectra from dynamically evolving surface realizations. The modelling of the Doppler spectrum of a time-varying ocean surface has gained considerable attention in the last decades. Knowledge of how the evolution of the ocean surface wave spectrum affects the scattered electromagnetic field is essential for a quantitative understanding of the properties of the measured microwave Doppler spectra. Complicated hydrodynamics, influencing the motion of the ocean surface waves, make this understanding significantly difficult. Non linear hydrodynamics couple the motion of the large and small waves and, consequently, change statistical characteristics and shapes of the surface-wave components. These hydrodynamic surface interactions are not included in the simplest linear sea-surface model, which assumes that each surface harmonic propagates according to the dispersion relation typical of water waves. Currently, available analytical scattering models are unreliable at high incidence angles and do not provide a full-polarimetric information. Exact numerical simulations of microwave scattering from time-varying ocean-like surfaces are highly recommended to eliminate concerns on the applicability of approximate models and to provide a validation tool for approximate scattering theories. Figure-3 shows the averaged Doppler spectrum of L-band (1.2 GHz) signals backscattered from Creamer non-linear surfaces at 3 m/s wind-speed, -60º wind direction and 40º incidence angle. The solid blue line refers to vertical polarization, the red line refers to the horizontal polarization; cross-polarization lines are depicted in red and black. a) b) where • Fig. 2: a) One dimensional linear and Creamer sea surface, extracted from a 2D surface realization; b)Time-space Fourier transform of linear (left) and non-linear (right) PM surface realizations for wind-speed 3m/s, wind-direction 0º. • Fig. 3:Simulated averaged Doppler spectrum in L-band 2. Surface Model 4. Numerical Method for Scattering 4. Simulation Method 6. Comparison with Experiments Discretization of the integral equation For fully developed deep-water sea, the linear surface can be realized as superposition of harmonics whose amplitudes are independent Gaussian random variables with variances proportional to a certain wind-dependent surface roughness spectrum. Here, the Pierson-Moskowitz [1964] spectrum is used. Each harmonic is then allowed to propagate independently of all others accordingly to the water-wave dispersion relation, thus the spatial Fourier components at any time t can be expressed as: The sea surface elevation ζat spatial location rfor the time t can be generated by inverse Fourier transform. The data presented in this section were collected between December 10 and 15, 1991, during phase II of the SAXON-FPN experiment [Plant and Alpers, 1994]. Two coherent, continuous wave (CW) microwave systems with pencil beam antennas were operated from the German research platform “NORDSEE”. These systems operated at Ku and Ka bands, 14 and 35 GHz, respectively. Method of Moments Sparse-Matrix Flat Surface Iterative Approach no c) b) a) yes end Our Simulation Fig. 5:Mean Ku Doppler spectra for different wind speeds/direction (Φ) and incidence angles (θ) Computation of the Scattered Fields f) e) d) 8. Conclusions & Acknowledgments Simulate a sequence of time-varying 2-D non-linear sea surfaces with time step tn. If this duration is small enough, the surface can be regarded as frozen for the time interval tn. Calculate the scattered fields from a time frozen surface by solving the MFIE. Repeat the procedure at the point-2 Nttimes to get a time-varying field from an evolving surface realization and then compute a realization of the Doppler spectrum. Repeat the procedure at point-3 Nr times to get sufficient realizations of the Doppler spectrum. We have discussed the applicability of the integral equation method to the calculation of scattering and Doppler spectra from the sea surface. A fair agreement of the numerical model with Ku-band radar data, from the SAXON-FPN experiment, has been found. The model seems to be able to explain many of the observations, not only of mean microwave backscattering cross sections of the sea, between 40º and 85ºincidence, but also of the mean Doppler spectra. The authors wish to thank Prof. William J. Plant, the University of Washington, for the provision of the experimental data which have been used in this study. Fig.4. Dependence of Ku-band VV and HH normalized radar cross sections on incidence angle. Solid lines show VV cross sections and dashed lines show HH cross sections as predicted by various models. (a) Bragg, or slightly rough surface, scattering theory; (b) standard composite surface theory; (c) composite surface theory including free and bound, tilted Bragg waves; (d) integral expansion model by Fung & Pan, which unites the Kirchhoff approximation, on one hand, with the small perturbation, on the other; (e) SeaWind NSCAT-2 Geo-physical Model Function and (f) numerical simulation of backscatter from non-linear ocean surface realizations. The circles, triangles and squares indicate values measured in Phase II of SAXON-FPN. Fig. 1: Directional Pierson-Moskowitz wave spectrum (up-left) ,the ζ(K,t) spectrum (up-right) and the spreading function (down-left)