Download
1 / 15
150 likes | 173 Views
This study explores the control and playability of a two-polarisation time domain physical model of a bowed string. It examines the impact of bowing parameters on the string's response and visualizes the playable parameter space. The results provide insights into the difficulties in controlling the bowed string and suggest potential applications and extensions for sound synthesis.

E N D
Bow control and playability of a two-polarisation time domain physical model of a bowed string CharlotteDesvagesMichael Newton Charlotte.Desvages@ed.ac.uk Michael.newton@ed.ac.uk Acoustics and Audio group University of Edinburgh, United Kingdom Thanks to:
Structure • Context • Model presentation • Parameter exploration • Visualising results • Discussion, applications, extensions, and concluding remarks
Context:bowed string playing • Bowed string playing is highly sensitive to small variations of bowing parameters: • Bow downwards force • Bow transverse velocity • Bow-bridge distance • Allows for great expressive control • Makes it challenging to learn • Ease of control of a bowed string is often labelled as playability, and has been quantified experimentally and on virtual strings
Context:A bowed string physical model • Physical models based on the behaviour of real instruments should exhibit appropriate response to each parameter combination including the bad ones! • output is difficult to control/predict without parameter studies.
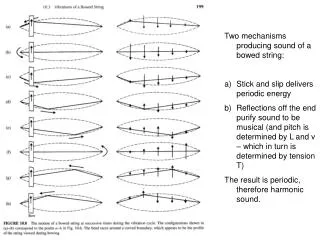
A BOWED STRING PHYSICAL MODEL MODEL: • 2-polarisation linear, lossy, stiff string, with fixed boundary conditions • Nonlinear contact force between bow and string, vertically • Modulates transverse friction force, relative-velocity dependent NUMERICAL RESOLUTION: • Equations of motion are discretised into an energy-balanced finite difference scheme • Full system simulated at audio sample rate • Displacement and velocity of the string read out
A BOWED STRING PHYSICAL MODEL • Time-stepping simulation algorithm • Dynamic control parameters, in the form of input time series: • Bow position • Bow downwards force • Bow transverse force (dictating bow velocity) • bow force vector magnitude and angle.
PARAMETER EXPLORATION:Playability and graphical representation J.C. Schelleng, “The bowed string and the player”. J. Acoust. Soc. Am., 53(1), 1973, pp.26—41.
PARAMETER EXPLORATION:Playability-force diagrams • Can we visualise the bowing parameter space in an analogous manner to that of Schelleng? the force vector representation suggests an obvious layout: 0 +
PARAMETER EXPLORATION:GENERATING SIMULATIONS • 10 static bow positions at integer ratios of the string length: to • ( increments) • ( increments) • Results examined after the initial transient, when steady-state oscillations are established.
PARAMETER EXPLORATION:Steady-state classification • Relativevelocity signal between string and bow is quantised • Autocorrelation analysis applied on quantised quantised ACF • Analysis of location, spacing, spread of the peaks of the quantised ACF set of simple rules to classify the oscillation state into one of 6 categories. x x x x
PARAMETER EXPLORATION:EVOLUTION ALONG BOW POSITION • We count the regime membership to evaluate the size of the playable area • Peak at , then Helmholtz area decreases with decreasing bow-bridge distance • Increase of multiple slipping cases • Thinning of raucous region
PARAMETER EXPLORATION:EVOLUTION ALONG BOW POSITION • We draw conservative upper and lower straight lines delimiting the bow force angle range yielding reliable Helmholtz motion • The Helmholtz region rotates anticlockwise, towards steeper force vector angles for decreasing bow-bridge distances (minimum and maximum angle both increase) • However, the bow force angle range seems approximately constant.
Discussion • This study provides an initial exploration of the range of bowing parameters giving rise to various steady-state oscillation regimes for this bowed string model • A tool is developed to visualise the playable parameter space of this particular synthesis algorithm • Plots show similarities with Schelleng diagrams: we observe a triangular Helmholtz-playable region • Conservative bow force limits can be characterised in terms of the bow force angle only • Clear maximum bow force limit; minimum bow force is less evident, in line with previous research • Further applications: • Study of transient behaviour • Playability database for sound synthesis • Study of the influence of physical parameters on playability