Crashworthiness Design using Topology Optimization
Crashworthiness Design using Topology Optimization. University of Notre Dame Department of Aerospace and Mechanical Engineering Neal Patel 20 th Graduate Student Conference 19 October 2006. Outline. Problem description Topology optimization Hybrid Cellular Automaton (HCA) method

Crashworthiness Design using Topology Optimization
E N D
Presentation Transcript
Crashworthiness Design using Topology Optimization University of Notre Dame Department of Aerospace and Mechanical Engineering Neal Patel 20th Graduate Student Conference 19 October 2006
Outline • Problem description • Topology optimization • Hybrid Cellular Automaton (HCA) method • Material parameterization for nonlinear dynamic problems • Example and results 20th Graduate Student Conference
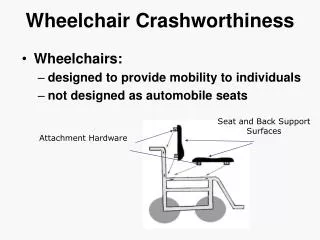
Vehicle crashworthiness design • Design of structures subject to crushing loads • Typically the objective to design structures that maximize energy absorption while retaining stiffness • Simulations of designs typically take hours to days to execute • Usually optimized by sampling designs and building a meta model (approximated model) 20th Graduate Student Conference
F Topology optimization • Optimization process systematically eliminates and re-distributes material throughout the domain to obtain an optimal structure • Uses the finite element method for structural analysis • This research utilizes continuum-based topology optimization to generate designs • Cellular automata computing & control theory are used to distribute material within a discretized design domain 20th Graduate Student Conference
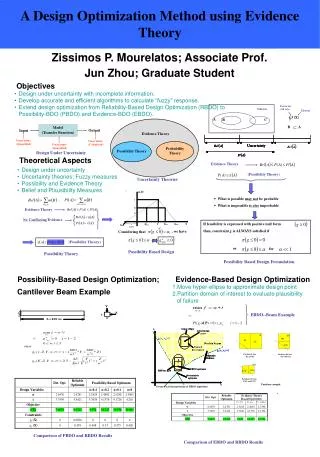
Material parameterization:Traditional elastic-based topology optimization Density Approach (isotropic) [Bendsøe, 1989] Solid Isotropic Material w/Penalization (SIMP) is mapped to the global stiffness in the finite element model each iteration 20th Graduate Student Conference
Commercial topology optimization • Use elastic-static material assumptions • Well-known schemes are gradient-based • Optimality Criteria (OC) methods • Method of Moving Asymptotes (MMA) • SLP/SQP • Disadvantages of gradient-based optimizers • Can be time-consuming due to large number of design variables (numerical finite-differencing) • Complex problems require approximations (analytical expressions) We developed the non-gradient HCA method 20th Graduate Student Conference
Proposed hybrid cellular automaton (HCA) algorithm Initial design (0)= x(0)0 E(0)= x(0)E0 2/3 Y(0)= x(0) Y0 Eh(0)= x(0)Eh0 Dynamic Analysis x(k+1) U(x(k)) Update material distribution using HCA rule Δx = f(U,U*) (k+1)= x(k+1)0 E(k+1)= x(k+1)E0 x(k+1) = x(k)+Δx 2/3 Y(k+1)= x(k+1) Y0 Eh(k+1)= x(k+1)Eh0 Convergence test |x(k+1)– x(k)|<e no newly developed material model yes Final design 20th Graduate Student Conference
New HCA target • In traditional elastic-static problem, to design for stiffness, material is distributed based on the strain energy (Ue) generated during loading • For non-conservative problems, we use internal energy (U) which includes both elastic strain energy and plastic work during loading target (S) strain energy density target (S) internal energy density 20th Graduate Student Conference
Traditional material parameterization:Static-elastic problems linear problems(perfectly elastic material) Density Approach 20th Graduate Student Conference
Y Eh E piecewise linear model of the stress-strain curve New material parameterization:Nonlinear dynamic problems nonlinear problems(elastic-plastic) dynamics problems mapping density to the mass matrix 20th Graduate Student Conference
Evolution of structure using HCA global local loading unloading reaction force ( ) stress ( ) absorbed energy plastic work () recoverable energy ( ) displacement ( ) strain( ) global behavior local behavior 20th Graduate Student Conference
z x y Example problem: pole test 21 21 21 elements* *~40 minutes/FEA (DYNA) evaluation 20th Graduate Student Conference
Static-elastic results (OptiStruct) Interpreted topology Raw topology (40 iterations) 20th Graduate Student Conference
Dynamic-plastic results (HCA) Raw topology Interpreted topology (37 iterations) 20th Graduate Student Conference
Comparison summary TCO topology OptiStruct topology 2,486,100 J IED 1,095,800 J max IED=1,095,800 J max IED=2,486,100 J 0.695 pe 0.315 max pe=0.659 max pe=0.315 20th Graduate Student Conference
Conclusions • HCA is an efficient non-gradient methodology for generating concept designs for structures subject to collisions • Demonstrates basic results for a simple problem • Use of information from previous iterations leads to better convergence 20th Graduate Student Conference
Thank you 20th Graduate Student Conference
215 mm =25° 125 mm 55 mm Honda knee bolster problem • Design domain composed of 36 x 21 x 9 brick elements • Kneeform has a constant velocity of -833 mm/s • Aluminum 6060-T6 material 20th Graduate Student Conference
Case #1 No base angle (=0°), no top plate Mf=0.3 Raw topology Interpreted topology (77 iterations) 20th Graduate Student Conference
Plastic strain distribution (case #1) 20th Graduate Student Conference
Case #2 base angle (=25°), no top plate Mf=0.3 Interpreted topology Raw topology (26 iterations) 20th Graduate Student Conference
Case #2 – IED distribution Final topology Initial design domain (26 iterations) (x=0.3) 20th Graduate Student Conference