Download
1 / 30
340 likes | 713 Views
NPIC Faculty of Electricity Control Engineering. Properties of Root Locus . Lesson Objectives : After finish this lesson, students will be able to be aware of the control system problem be aware of the vector representation of complex number

E N D
NPIC Faculty of Electricity Control Engineering Properties of Root Locus • Lesson Objectives : After finish this lesson, students will be able to • be aware of the control system problem • be aware of the vector representation of complex • number • define the root locus • determine the properties of root locus Lecturer : IN SOKVAN
Lesson Objectives 01 • Aware of Control System Problem Lecturer : IN SOKVAN
The Prerequisites To Root Locus Technique • Understanding the control system problems • Vector representation of complex numbers Lecturer : IN SOKVAN 3
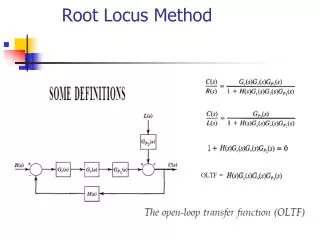
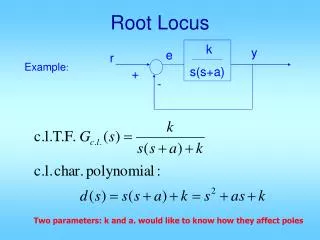
The Control System Problem General Feedback Control System Open Loop Transfer Function Also called, Loop Gain Closed-loop Transfer Function Lecturer : IN SOKVAN 4
The Control System Problem What is the control system problem? Difficult to obtain the poles Poles location varied with the gain Let’s find the closed-loop transfer function Lecturer : IN SOKVAN 5
The Control System Problem Comparison Between Open Loop and Closed Loop Systems • OL poles are roots of: • Forward transfer function denominator • Feedback transfer function denominator • CL poles are roots of: • Combinations of numerator and denominator of forward and feedback transfer functions • Poles depend on gain, K Therefore, with CL system, the poles are not easily obtained and change with the value of K Lecturer : IN SOKVAN 6
The Control System Problem - Example Given: Open Loop System Poles: 0, -2 and -4 Closed-loop System Poles: We have to factor and also depends on K. Root locus technique help to find poles! Lecturer : IN SOKVAN 7
Lesson Objectives 02 • Aware of the Vector Representation of Complex Number Lecturer : IN SOKVAN
Vector Representation of Complex Number What is complex number? Vector has magnitude and direction Complex number is a vector Therefore, we can also represent complex number s as: Lecturer : IN SOKVAN 9
Vector Representation of Complex Number But, if s is a variable in a function, how to represent the complex number. For example, Graphically, Replacing s, Another complex number 10 Lecturer : IN SOKVAN
Vector Representation of Complex Number 11 Lecturer : IN SOKVAN
Vector Representation of Complex Number Same Vector Same Vector is a complex number and can be represented by a vector drawn from the zero of the function to the point s. 12 Lecturer : IN SOKVAN
Vector Representation of Complex Number General 13 Lecturer : IN SOKVAN
Vector Representation of Complex Number Example What is F(s)? 14 Lecturer : IN SOKVAN
Lesson Objectives 03 • define the root locus Lecturer : IN SOKVAN
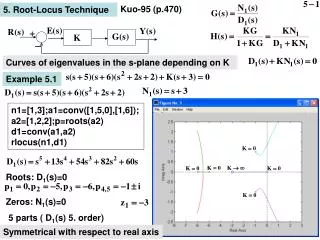
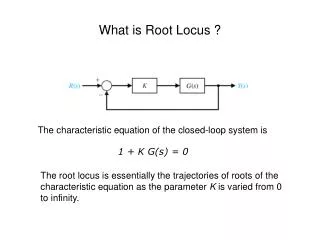
What is Root Locus? The root locus is the path of the roots of the characteristic equation shown out in the s-plane as a system parameter is changed.
Defining Root Locus 17 Lecturer : IN SOKVAN
Defining Root Locus 18 Lecturer : IN SOKVAN
Defining Root Locus Root Locus 19 Lecturer : IN SOKVAN
Defining Root Locus Root Locus Representation of the paths of closed-loop poles as the gain is varied What can we learn from this graphic? 0<K<25 The system is over-damped K=25 The system is critically damped K>25 The system is under-damped The system is stable 20 Lecturer : IN SOKVAN
Lesson Objectives 04 • Determine the properties of root locus Lecturer : IN SOKVAN
Properties of Root Locus How do we get poles? The value “-1” is a complex number 22 Lecturer : IN SOKVAN
Properties of Root Locus Magnitude Condition Angle condition 23 Lecturer : IN SOKVAN
Properties of Root Locus - Example • Steps: • Determine zeros and poles of the forward transfer function • Determine angles from zeros and poles to the interested point • Determine the length of vector from zeros and poles to the interested point • Add all angles. If it is equal to multiple of 180, then the point is on the root locus. • Determine K using length of zero and pole vectors Given a unity feedback system forward transfer function • Is point -3+0j is on a root locus? • If the point is on the root locus, find the value of K? 24 Lecturer : IN SOKVAN
Properties of Root Locus - Example • Determine zeros and poles of the forward transfer function Using quadratic equation, 25 Lecturer : IN SOKVAN
Properties of Root Locus - Example 2. Determine angles from zeros and poles to the interested point 26 Lecturer : IN SOKVAN
Properties of Root Locus - Example 3. Determine the length of vector from zeros and poles to the interested point 27 Lecturer : IN SOKVAN
Properties of Root Locus - Example 4. Add all angles. If it is equal to multiple of 180, then the point is on the root locus. Therefore, the point -3+0j is a point on the root locus 28 Lecturer : IN SOKVAN
Properties of Root Locus - Example 5. Determine K using length of zero and pole vectors 29 Lecturer : IN SOKVAN
Home work Given a unity feedback system forward transfer function • Is point -3+0j is on a root locus? • If the point is on the root locus, find the value of K? 30 Lecturer : IN SOKVAN