Download

1 / 14
150 likes | 282 Views
This project focuses on developing control software for an autonomous vehicle that can navigate an obstacle course. The vehicle will utilize LIDAR, GPS, a digital compass, and cameras to move from waypoint to waypoint while remaining within lane lines and avoiding obstacles. Currently, the navigation system is approximately 30% complete and features consistencies in code style, integrated with image processing to detect colors like yellow and white. The project aims to enhance navigation algorithms and improve data handling for effective real-time performance.

E N D
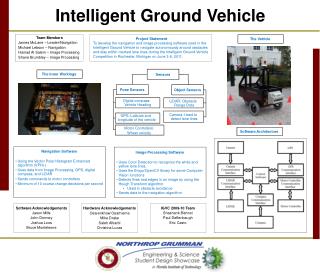
Intelligent Ground Vehicle Competition Navigation Michael Lebson - mlebson@my.fit.edu James McLane - jmclane@my.fit.edu Image Processing Hamad Al Salem - halsalem@my.fit.edu Shane Brumbley - sbrumble@my.fit.edu Faculty Sponsor Dr. EraldoRibeiro - eribeiro@fit.edu Project Website http://my.fit.edu/~mlebson/seniorDesign
Introduction • Designing Control Software for autonomous obstacle course navigating vehicle. • Must navigate from waypoint to waypoint • Must use LIDAR, GPS, Digital Compass, and Camera to determine movement around the course • Must stay within lane lines and avoid obstacles in the completion lane
Refactoring Progress • ~99% Done • Will continue as new code is written • Uses Hungarian notation • Consistent code style throughout • Reorganized as necessary
Current State of Navigation Roughly 30% done Vehicle has some “bugs” Grouping obstacles may be the problem Random, bad LiDAR data
What’s to Come for Navigation Improve Think() Improve CostFunction() Integrate image processing Handle bad data Test
Detecting Color Need to detect Yellow and White All color has Red, Green, and Blue values between 0 and 255 each. A combination of these three colors yields a shade. To detect color, you must look for a certain RGB combination.
Handling White White occurs when all values of RGB are 255. In order to detect white, we set up a range, usually of 35 units. In our demo, if a pixel is determined to be white, we will change the blue value to 0(Zero)
Handling Yellow Yellow occurs at red 255 and green 255, at a given range of 35 units each. Because a blue of 255 equals white, any blue value will create a lighter shade of yellow. In our demo, any yellow pixel is set to true yellow and non-yellow non-white pixels create are set to black.
Line Detection • By Using Emgu CV library (Open CV for C#) and the camera attached on the laptop • We use this library for some Computer Vision functions. • Detect lines and edges in an image • Easy and fast for detecting lines and edges in a video image • Produce and update the image frame • Detect lines by Hough transform Algorithm • Available in the Emgu CV library • Required conversion from Image to Bitmap to display the image on the picture box