User Interface
Presentation Laser Mouse. Department of Computer Engineering. Ryan Martin John Bidwell. What is the Presentation Laser Mouse?. Remote. Software Components.

User Interface
E N D
Presentation Transcript
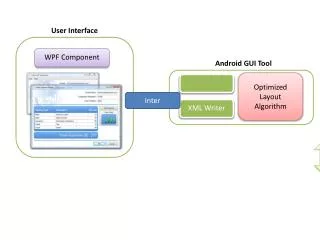
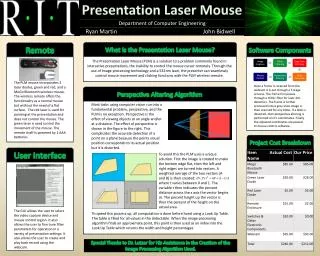
Presentation Laser Mouse Department of Computer Engineering Ryan Martin John Bidwell What is the Presentation Laser Mouse? Remote Software Components The Presentation Laser Mouse (PLM) is a solution to a problem commonly found in interactive presentations, the inability to control the mouse cursor remotely. Through the use of image processing technology and a 532nm laser, the presenter can seamlessly control mouse movement and clicking functions with the PLM wireless remote. The PLM mouse incorporates 2 laser diodes, green and red, and a MoGo Bluetooth wireless mouse. The wireless remote offers the functionality as a normal mouse but without the need of a flat surface. The red laser is used for pointing at the presentation and does not control the mouse. The green laser is used control the movement of the mouse. The remote itself is powered by 2 AAA batteries. Once a frame is received from the webcam it is put through a 5 stage process. The frame first passes through a YCbCr filter for laser dot detection. The frame is further processed into a grey scale image is then scanned for any blobs. If a blob is detected, then perspective altering is performed on it’s coordinates. Finally the adjusted coordinates are passed to mouse control software. Perspective Altering Algorithm Most tasks using computer vision run into a fundamental problem, perspective, and the PLM is no exception. Perspective is the effect of viewing objects at an angle and/or at a distance. The effect of perspective is shown in the figure to the right. This complicates the accurate detection of a point on a plane because the points visual position corresponds to its actual position but it is distorted. Project Cost Breakdown User Interface To avoid this the PLM uses a unique solution. First the image is rotated to make the bottom edge flat, then the left and right edges are turned into vectors. A weighted average of the two vectors (A and B) is then created: where t varies between 0 and 1. The variable t then indicates the percent distance across the x axis the vector begins at. The percent height up the vector is then the percent of the height on the actual area. The GUI allows the user to select the video capture device and mouse control region. It also allows the user to fine tune filter parameters for operation in a variety of presentation settings. It also allows the user to create and play back record using the webcam. To speed this process up, all computation is done before hand using a Look Up Table. The table is filled for all values in the detectable. When the image processing algorithm finds an approximate point, this point is then used as an index into the Look Up Table which returns the width and height percentages. Special Thanks to Dr. Lutzer for His Assistance in the Creation of the Image Processing Algorithm Used.