Download
1 / 19
190 likes | 431 Views
Adaptive Fuzzy Control of the Inverted Pendulum Problem. 任課老師:曾慶耀 老師 姓 名:周益賢 學 號: M98670012. 一、 Abstract( 摘要 ). Underactuated systems Adaptive control feedback linearization (FBL) fuzzy disturbance observer (FDO). 二、 THE SYSTEM MODEL. 一個支架模塊和一個控制控制台所組成。. A. 實驗設置.

E N D
Adaptive Fuzzy Control of the Inverted Pendulum Problem 任課老師:曾慶耀 老師 姓 名:周益賢 學 號:M98670012
一、Abstract(摘要) • Underactuatedsystems • Adaptive control • feedback linearization (FBL) • fuzzy disturbance observer (FDO)
二、THE SYSTEM MODEL 一個支架模塊和一個控制控制台所組成。 A.實驗設置 Fig. 1. The bytronic pendulum setup.
(1)倒單擺系統: 車的質量M 連桿質量 主體質量 連桿的桿長度L 車子的粘滯磨擦力鉸鏈的粘性磨擦力 F是應用到車子的力 車的質量M 連桿質量 主體質量 連桿的桿長度L 車子的粘滯磨擦力鉸鏈的粘性磨擦力 F是應用到車子的力 Fig.2實驗裝置示意圖
動態模型 • (1) • (2) Where
寫成狀態空間形態 狀態變數:
(2)伺服系統: • 伺服系統:伺服系統是由伺服電機、伺服放大器和伺服控制器組成。控制輸入是。該系統模型使用下列參數如下:
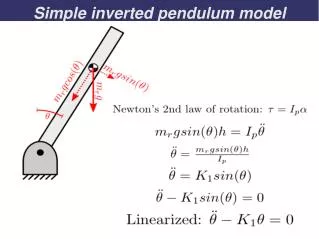
三:ZERO DYNAMICS ANALYSIS(零動態分析) • Feedback linearization(FBL):回授線性化的主要精神在於找到一個座標轉換及狀態回授,能將非線性系統轉換成線性非時變系統 • 回授線性化的方法主要可分為兩種:全狀態回授線性化及輸入輸出回授線性化。
FBL對控制系統整理 (7) (9)
四:ADAPTIVE FUZZY LOGIC CONTROL SYNTHESIS(適應性模糊控制推導的結合) • A.Feedback Linearizing Controller線性回授控制器 • B. Feedback Linearizing Controller With a Damping Term • C.Feedback Linearizing Controller for Tracking Cart Position (線性回授控制器對車子的位置追跡) • D. Adaptive Fuzzy Control Based on a Fuzzy Disturbance Observer(FDO) (根據模糊干擾觀測做適應性模糊控制 )
C.Feedback Linearizing Controller for Tracking Cart Position (線性回授控制器對車子的位置追跡)
D. Adaptive Fuzzy Control Based on a Fuzzy Disturbance Observer(FDO) (根據模糊干擾觀測做適應性模糊控制 ) • FBL控制器時,如果模型受到很大的不確定性或輸入干擾和雜訊,控制器的性能將會降低。在這,我們可以利用FDO技術。適應性模糊系統用在未知的干擾,此干擾不管內外在都適用。而且此種控制方法也不受其他的特殊條件限制。
EXPERIMENTAL RESULTS(實驗結果) • Fig.7顯示的結果為兩種情況:有適應性控制器和沒有適應性控制器。 • 追跡問題的結果:Fig.8 顯示追跡的結果圖,並說明了假如沒有使用AFLC去控制,輸出結無法追跡。