Download
1 / 29
290 likes | 439 Views
Progressive Fuzzy Fusion Control of Two Coupled Inverted Penduli. Zhen Song, Pranav Sukthankar, YangQuan Chen, Jason Gu. Some Multi-Media First!. Click this picture!. How to freeze the pendulum? – with the engineering approach!. Outline. Motivation. System descriptions.

E N D
Progressive Fuzzy Fusion Control of Two Coupled Inverted Penduli Zhen Song, Pranav Sukthankar, YangQuan Chen, Jason Gu
Some Multi-Media First! Click this picture! How to freeze the pendulum? – with the engineering approach!
Outline • Motivation. • System descriptions. • Problem statement and analysis. • The proposed solution. • Experiment results. • Conclusion.
Motivation • Major aim: reject the disturbances of a spring-coupled inverted penduli (IP) system. • Engineering oriented: the system model is partially known. • Practical fuzzy logic controller (FLC) tuning: progressive improvement on the system performance. • Information fusion by FLC: fuse the angle and speed information in the framework of fuzzy logic.
System Description • Rotary IP system. • Coupling with a spring whose stiffness constant is unknown. • Left: pendulum 1. Right: pendulum 2. • Apply disturbances on pendulum 1. • Assume: only length is known. • Sensor: two encoders for rotation angle and two potentiometers for angular speed measurement. • Goal: design a controller to reject the disturbance on pendulum 2.
Cont A picture of our test bed. System configuration.
“Is it a solved problem?” • Yes – if the system model is totally known. See[1][2]. • No – if only part or nothing of the system model is known, which is more practical for engineers. [1] D. T. Gavel and D. D. Siljak. Decentralized adaptive control: structural conditions for stability. IEEE Tran. Automatic Control, 34(4):413–426, Apr. 1989. [2] Z. Gong, C. Wen, and D. P. Mital. Decentralized robust controller design for a class of interconnected uncertain systems: with unknown bound of uncertainty. IEEE Tran. Automatic Control, 41(6):850–854, June 1996.
Problem Statement • Challenge 1: the plant is not totally known. It is only structured known. • We assume only the length is known, since it is difficult to measure other parameters, such as inertia or mass, in practice. How to do without model? • We know the structure of the system. How to use this knowledge?
Cont • Challenge 2: need systematic fuzzy controller tuning strategies. • The angle and speed information are available. How to fuse information? • To use the speed feedback, the dynamic properties need to be considered. However, it is not straight forward to write “if then” fuzzy rules. How to design the FLC for a complex system? • We prefer a progressive approach so that we can go on tuning until the desired performance is achieved. The key requirement is that we do not need to start over during the procedure. How to progressively design the FLC?
Problem Analysis • Key point: “progressive information fusion.” • Systematically and progressively analysis the system. • Fuse speed and angle information. • Progressive fusion by “trial-and-error.”
The Procedure • PI tuning: stabilize the penduli without the coupling spring firstly. • Static decoupling: • Link the penduli with the spring. • Consider only the tension force on the spring. • Design FLC to eliminate the tension force as much as possible. • “Trial-and-error.” • Dynamic decoupling: • Observe the system performance. • Describe the control laws for compensate in natural language. • Implement the control laws by FLC. • “Trial-and-error.” 1 2 3
The Matlab Model • PI Tuning
The Performance of PI Controller Disturbance (case 11) • Frequency (Freq): 1 Hz • Amplitude (Amp): 10° • Shape: Sin signal Click this picture!
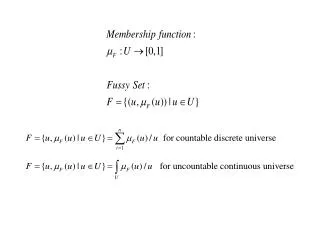
Multiply the output of FLC1 with the output of Ext2 (the estimation of ). The result is used for compensation. Static Compensation • It is relative objective. The coordinates of the top of pendulum 1 is . The top of pendulum 2 is . The extension of the spring is .
Ext2 Gain 5 Gain 6 Matlab Model • For static decoupling: Gain 5 is not 0, and Gain 6 is 0. • For dynamic decoupling: both Gain 5 and Gain 6 are not 0.
Fuzzy Rule Base • Positive angle is clockwise. • Positive FLC output drives the IP rotate in anti-clockwise direction.
The Performance of Static Decoupling Disturbance (case 11) • Frequency (Freq): 1 Hz • Amplitude (Amp): 10° • Shape: Sin signal Click this picture!
Dynamic Decoupling • Consider the performance by ITAE and the max angle.
Cont. • Observe the performance, propose dynamic decoupling rules in natural language, and write them in fuzzy rules. • Observed: a delay between and , because of the inertia of the pendulum. • Control law in natural language: “start to compensate when starts to become positive.” Positive angle is clockwise
Fuzzy Rule Base • Positive angle is clockwise. • Positive FLC output drives the IP rotate in anti-clockwise direction.
The Performance of Dynamic Decoupling Disturbance (case 11) • Frequency (Freq): 1 Hz • Amplitude (Amp): 10° • Shape: Sin signal Click this picture!
Significant Improvement Averaged Results
Test the Performance with Different Pseudo Random Disturbances • Test the performance by non-period disturbance. • Construct pseudo random signal by saw (sawsig), square (sqsig) signals that generate by the Matlab signal generator block.
Significant Improvement Cont. • Left: disturbance. • Right: result.
Conclusion • Proposed some progressive FLC tuning strategies. • Fuzzy fusion help to improve the performance. • A systematic FLC design approach: “iterative binary decomposition.” • Balance the subjective and the objective. • The proposed strategies are “simple and effective.” • The experiment on the test bed was successful.
For More Information • Visit CSOIS website • http://www.csois.usu.edu • http://www.csois.usu.edu/publications/ • See more video clips • http://scontrol.iscool.net or http://scontrol.yeah.net • Authors’ personal homepage • Zhen Song http://scontrol.iscool.net or http://scontrol.yeah.net • YangQuang Chen http://www.csois.usu.edu/people/yqchen/http://www.csois.usu.edu/ilc/ • Jason Gu http://www.dal.ca/~jgu/