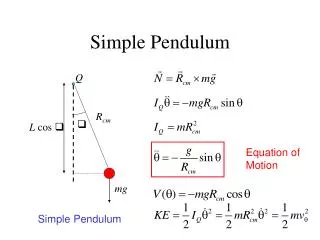
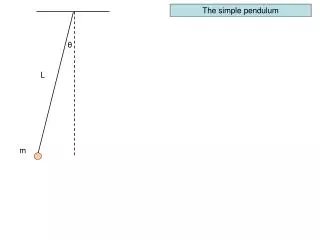
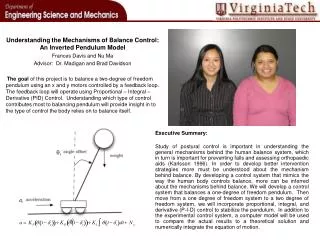
Simple inverted pendulum model
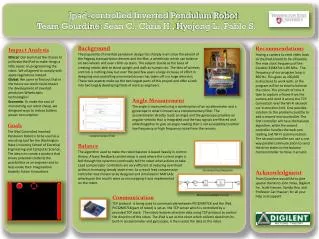
Simple inverted pendulum model. Simple inverted pendulum with force input. PID Controller. Microcontroller. MSP430F1611 16 bit RISC processor 48kB Flash 10kB RAM 12 bit A/D with 8 pin-accessible inputs Two 16 bit timers 1.8-3.6v. Inertial Measurement Unit. IDG-300 Gyroscope
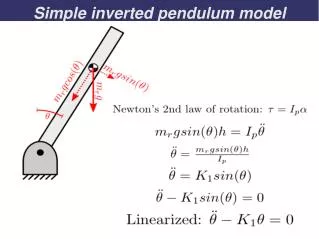

Simple inverted pendulum model
E N D
Presentation Transcript
Microcontroller • MSP430F1611 • 16 bit RISC processor • 48kB Flash • 10kB RAM • 12 bit A/D with 8 pin-accessible inputs • Two 16 bit timers • 1.8-3.6v
Inertial Measurement Unit • IDG-300Gyroscope • ADXL-330Accelerometer
IDG-300 Gyroscope • Dual-Axis rate gyroscope • Operates by oscillating masses and capacitively measuring vibration caused by Coriolis effect. • Sensitivity: 2 mV/°/s • Max rate: 500 °/s • Operating voltage: 3.0-3.3v
ADXL-330 Accelerometer • Triple-axis accelerometer • Micro-machined structure suspended over silicon by polysilicon springs. Plates mounted on moving structure and a fixed structure act as a variable capacitor in a filter circuit to measure acceleration. • Sensitivity: ~300mV/g • Max acceleration: ±3.0g • Operating voltage: 2.0-3.6v (sensitivity is ratiometric)
Estimating pendulum orientation • Integrating rate gyros subject to drift. • Accelerometers only work when stationary. • Use both estimates to get better estimate of orientation.
Bluetooth Module • Basically a breakout board for NXP's BGB203. • Class 1 so has a 100m range • 100 mW max transmitted power • 3.3 volts • 1 Mbps max UART
H-Bridge • LMD-18200 • 3 amps continuous, 6 amps temporary
H-BridgeDirection Control • Forward • Reverse • Brake • Short Circuit