Download
1 / 3
30 likes | 201 Views
Real-Time Control Architecture (7-6). Background of research. • Control architecture for intelligent robots which lacks real-time capabilities cannot guarantee safety of robot operation and implementation of intelligent movement. ▪ Real-time capable control architecture is needed.

E N D
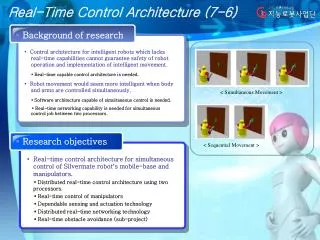
Real-Time Control Architecture(7-6) • Background of research • Control architecture for intelligent robots which lacks real-time capabilities cannot guarantee safety of robot operation and implementation of intelligent movement. ▪ Real-time capable control architecture is needed. • Robot movement would seem more intelligent when body and arms are controlled simultaneously. ▪ Software architecture capable of simultaneous control is needed. ▪Real-time networking capability is needed for simultaneous control job between two processors. < Simultaneous Movement > • Research objectives < Sequential Movement > • Real-time control architecture for simultaneous control of Silvermate robot’s mobile-base and manipulators. ▪ Distributed real-time control architecture using two processors. ▪ Real-time control of manipulators ▪ Dependable sensing and actuation technology ▪ Distributed real-time networking technology ▪ Real-time obstacle avoidance (sub-project)
Real-Time Control Architecture(7-6) • Research contents • Design and implementation of distributed real-time control architecture using two processors. • Real-time control of manipulators. • Dependable sensing and actuation technology. ▪ Research on Robot Health Monitoring. ▪ Sensor fault detection and recovery. ▪ Development of dependable real-time RT-CAN and RS485 drivers. • Distributed real-time networking using Ethernet. < Distributed Real-Time Control Architecture using RTAI> < Virtual Resource for Distributed Control > < Manipulator Control Movie > < Structure of Real-Time CAN Driver >
Project Leader Byung Kook Kim Professor, Division of Electrical Engineering, School of Electrical Engineering and Computer Science Korea Advanced Institute of Science and Technology (KAIST) bkkim@ee.kaist.ac.kr Research Institutes : KAIST, Cheju National Univ. Researchers : 14 (Univ. 14, Industry 0)