Download

1 / 95
950 likes | 981 Views
This paper discusses probabilistic motion planning with a focus on the roadmap planner, analysis, and improved solutions. It covers the principles of randomized planning, clearances, adjacency, and more. It also explores applications in various fields like manufacturing and molecular motions.

E N D
Probabilistic Motion Planning Shai Hirsch May, 2002
Outline • Introduction • Probabilistic Scheme • Probabilistic Roadmap Planner • Analysis • Improved Solutions
Outline • Introduction • Probabilistic Scheme • Probabilistic Roadmap Planner • Analysis • Improved Solutions
Exact General-Purpose Path Planners - Schwarz and Sharir, 1983: Exact cell decomposition based on Collins technique - Canny, 1987: Silhouette method
Complete Solutions • Small #dofs Tailored solutions for specific problems. Example: Non convex polygon (k sides) Translating and rotating Planar polygonal environment (O(n)). Constructing F in Θ((kn)3 log kn) Single query in O((kn)2+є), for any є > 0.
Complete Solutions • Advantages: • Complete • Specifically, handles narrow / tight passages. • Bounded running time. • Behavior well characterized. • Insight
Complete Solutions • Disadvantages • High complexity • Hard to understand • Hard to implement • Inflexible to changing scenarios (different geometrical settings)
Complete Solutions • Existing complete algorithms become practically useless unless #dofs is low (between 3 and 5). • Complete solutions cannot be used for rigid objects translating and rotating is 3D. • Nor for 6-dof manipulator arms.
Real Applications • Many dofs • Problems may be more complex
Moving obstacles Multiple robots Movable objects Deformable objects Goal is to gather data by sensing Nonholonomic constraints Dynamic constraints Optimal planning Uncertainty in control and sensing Extensions to the Basic Problem
Application: Graphic Animation of Digital Actors James Kuffner’s PhD
Application: Design for Manufacturing General Motors General Electric General Motors
Application: Computer-Assisted Surgical Planning Joel Brown’s PhD Rhea Tombropoulos’s PhD
Application: Prediction of Molecular Motions Amit Singh’s PhD
Planner Wish List • Complete • Handles narrow / tight passages. • Bounded running time. • Behavior well characterized. • Low complexity • Not too hard to understand • Not too hard to implement • Scalable
Outline • Introduction • Probabilistic Scheme • Probabilistic Roadmap Planner • Analysis • Improved Solutions
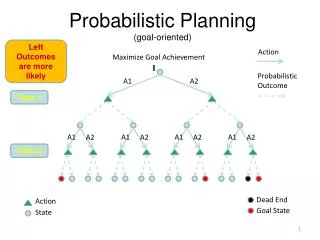
milestone qg qb Principle of Randomized Planning (Probabilistic Roadmap) free space [Kavraki, Svetska, Latombe,Overmars, 95]
Probabilistic Scheme General Idea Trade a limited amount of completeness against a major gain in computing efficiency.
Probabilistic Scheme • Probabilistic Completeness If a solution path exists, the planner will find one in bounded time, with high probability. (weaker completeness but still interesting.)
Probabilistic Scheme • Probabilistic completeness become particularly interesting if… ? …the running time grows slowly with the inverse of the failure probability.
Probabilistic Scheme • C is the cube [0, 1]n. • Each configuration is an n-tuple (q1, …, qn).
Probabilistic Scheme • Cfree is implicitly given by a function CLEARANCE: C • Maps any configuration q to the distance of the robot placed according to q and • the obstacles • two bodies of the robots (whichever is smaller)
Probabilistic Scheme • Cfree is implicitly given by a function CLEARANCE: C • For complete planners, we computed an complete and explicit representation of Cfree. • With prms, we only get one glimpse at a time of Cfree.
Probabilistic Scheme • CLEARANCE(q) is the clearance of q. • In case where the robot collides with an obstacle or with itself, CLEARANCE(q) returns 0 or a negative number. • CLEARANCE(q) > 0 implies q Cfree . (Collision Detection)
Probabilistic Scheme Maximal Curve Tracing Constant robot A positive constant s.t., when A moves along a straight line in C between any two configurations q and q’ No point of A traces a curve segment longer than max|qi – q’i|
Probabilistic Scheme from (1, 2) to (’1, ’2)
Probabilistic Scheme Adjacency Configurations q, q’ with clearances , ’, resp., are adjacent if max|qi – q’i| < ½ max {, ’} .
Probabilistic Scheme ’ 2 1
Probabilistic Scheme • Clearly, if two configurations are adjacent, then the straight line joining them lies entirely in Cfree . • Why the ½ coefficient in max|qi – q’i| < ½ max {, ’} ?
Probabilistic Scheme d q q’ = ’ = d, = 1 max|qi – q’i| < d
Probabilistic Scheme • Note that the map CC max |qi – q’i| is in the L distance in C. • We could choose other distances in C to define adjacency. • Of course, the constant depends on this choice. (Choice of Metric)
Probabilistic Scheme • Pick configurations in Cat random; retain configurations in Cfree (along with q-init and q-goal) as nodes of graph G; connect adjacent configurations by links of G. • Return YES if q-init and q-goal belong to the same connect component of G. • Return NO if no path has been found after having generated c configurations (c an input parameter).
Probabilistic Scheme • Then answer YES is always correct • whenever the planner returns YES, there actually exists a collision-free path connecting q-init to q-goal.
Probabilistic Scheme • Indeed - after a finite amount of computation (defined by the parameter c) - the planner may still not have found a path between q-init and q-goal, even if one exists.
Probabilistic Scheme The key component of this planning scheme is the sampling strategy. (begin with uniform…)
Probabilistic Scheme • We are interested in the multi-query case so we will invest preprocessing time to construct a roadmap of configurations.
Toward an Analysis • Efficiency may be evaluated through experimentation. • Formal analysis is desirable • to compare planners • to stress their strengths and weaknesses. • Ideally a planner's outcome should be YES with the highest probability whenever a free path exists. • This outcome should be generated in minimal time.
Toward an Analysis • Analysis: relate probability of an incorrect answer to running time. • Given a small positive number , bound planner running time by a function of .
Toward an Analysis • What relation makes a planner good? ? • If function grows slowly with 1/, the planner is particularly interesting. • We get arbitrarily close to full completeness at a reasonable cost.
Toward an Analysis • Assume for simplicity that CLEARANCE takes constant time. • Is that a realistic assumption? ?
Toward an Analysis • Assume for simplicity that CLEARANCE takes constant time. • Running time mainly depends on ? • # of sample confs. • # of pairs checked for adjacency
Toward an Analysis • # sample configurations c. • Only a fraction of them, f, are in Cfree, hence in the constructed graph G. • In practice, often f c. • The planner should strive to get the greatest ration f/c • But, the distribution of the generated free configurations is also crucial to eventually find a path.
Toward an Analysis • # adjacency checks is at most proportional to f 2. • However, the planner may choose not to test all pairs of free configurations for adjacency.
Toward an Analysis • It seems likely that no strong property can be proven for any given planner, if we do not make some assumption about Cfree. • Moreover, no single planner is likely to be the most efficient for all possible problems. • This suggests that planners should be analyzed under some well specified assumptions.
Outline • Introduction • Probabilistic Scheme • Probabilistic Roadmap Planner • Analysis • Improved Solutions
Probabilistic Roadmap Planner • Preprocessing • Constructing a network R of configurations • Query Processing • Connecting qinit, qgoal to two milestones. • Checking of these two milestones are in the same connected component of R.
Probabilistic Roadmap Planner • Configurations in R are called milestones. • The milestones are a subset of all sample configurations generated. (The roadmap is not exactly G from the scheme.)
Probabilistic Roadmap Planner • Planner uses simple algorithm Connect to construct the links of R. • Connector: • Given two milestones m1 and m2, is the straight-line segment connecting them in Cfree. • Dichotomically breaking the segments into shorter sub-segments. • Stops breaking when a pair of milestones are adjacent, or if one of them is not free.
Probabilistic Roadmap Planner • For simplicity, assume that connect only tries straight paths. • It could try other canonical paths as well. • A configuration sees another configuration if the straight-line segment joining them lies entirely in Cfree.