Section 4 Flight Software
Section 4 Flight Software . . . Ray Whitley EO-1 WARP Flight Software Lead S-Band RF SA GPS RWA R000 R000 R000 Mongoose - V CSS ACE COMM H/K ACS/C&DH AST RSN IRU RSN RSN PSE RT RT RT BC RT RT RCS RSN MTB TAM PPT SADE R000 R000 R000 R000 M - V RT RT RT

Section 4 Flight Software
E N D
Presentation Transcript
Section 4 Flight Software . . . Ray Whitley EO-1 WARP Flight Software Lead
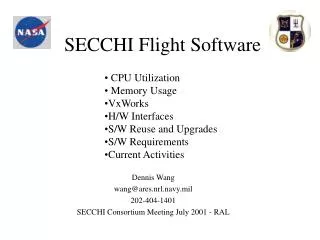
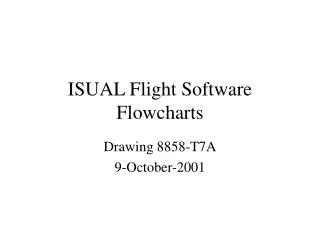
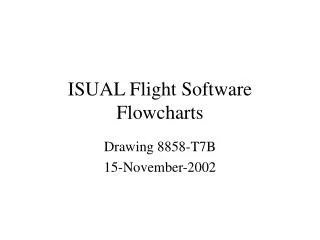
S-Band RF SA GPS RWA R000 R000 R000 Mongoose - V CSS ACE COMM H/K ACS/C&DH AST RSN IRU RSN RSN PSE RT RT RT BC RT RT RCS RSN MTB TAM PPT SADE R000 R000 R000 R000 M - V RT RT RT RT RT RT XBAND WARP ALI RSN RSN RSN LAC Hyperion WARP X-Band RF Spacecraft Bus Architecture 2Kbps 4Mbps 4Mbps 4Mbps Sci Bkup 1773 Data Bus 105 Mbps Science - instrument or procured - GSFC managed
MAP/TRMM Heritage • Litton Space Act personnel developed PSE & HSK software for MAP and for subsequent use on EO-1 • Bulk of S/C bus software ported from XTE / TRMM to the Mongoose V with MAP civil servants and Litton Space Act personnel • Mongoose V, PSE, Comm, and HSK baseline builds received between 11/98 and 12/98 • ACS attitude control derived from TRMM ACS flight code • ACE’s safe-hold algorithm derived from XTE / TRMM designs (same as ACS sun acquisition module in main processor)
Functionality By Processor • ACS/C&DH Mongoose V: • Attitude determination & control modes • Real-time & stored command distribution to all subsystems • Telemetry acquisition and frame generation • Time maintenance & distribution • SSR record and playback (s/c & instrument housekeeping data) • ACE RSN: • Independent safe-hold • Sensor data acquisition • Actuator commanding • Comm RSN: • Command reception & de-blocking • Telemetry transmission • Spacecraft time correlation
Functionality By Processor-2 • HK RSN: • GPS time/position data acquisition • thermister data collection • High Output Parrafins (HOPS) deployment control & monitoring • Miscellaneous LVPC services • PSE RSN: • power subsystem monitoring & control • X-Band RSN: • Phased Array Antenna command distribution • Phased Array Antenna housekeeping data collection & monitoring
Functionality By Processor-3 • WARP Mongoose V: • Science data record set-up and control • Science data X-band & S-band playback control • WARP RSN: • Command distribution for LVPS services inside WARP • Housekeeping data acquisition & monitoring for the WARP
Verification Approach • Component & system level I&T at software lab prior to and at s/c delivery • Well documented and repeatable stol test procedures executed in lab and repeated upon delivery to spacecraft • Equivalent to “long form functional” • Code walk-thrus with panel of FSW peers, subsystem lead, & s/c systems engineering • Spacecraft subsystem functional, CPTs, “special tests” • Bus error injection and memory corruption • Processor stress test
Significant Test Results • All flight software components are now fully operational and healthy meeting both functional and performance requirements • significant problems uncovered during last three months of I&T, and since retified: • PSE shunting & power subsystem FDC requirements clarification • time maintenance with GPS data • inconsistent requirements in high-level FDCs (TSMs) and requirements just missing
Special Topic: Flight Software Maintenance Capability
On-orbit Sustaining Engineering • Maintenance Plan originally drafted by THC/Microtel in early September ‘99 include: • Key contractor personnel associated with the development of key flight software components • Available flight software development facility components for Swales and GSFC • Optionally augmenting maintenance facility with one or more higher fidelity breadboards • Have basic facility ready within days after spacecraft ships • For Training purposes, • Maintenance personnel participated in recent code walk-thrus of 2 mission critical flight software subsystems • Assisting in development of test data to be used to verify FDCs and TSMs in the software lab • Gather, review, and configure all software specification & user documentation • Re-verify software load/dump/verify utilities prior to S/C launch
ACS/EFF ACE CM HK PSE FSW Lead COMM X BAND Sys. Eng. WARP M5/RSN C&DH * The following engineers are available for consultation should the need arise during the mission: C. Xenophontas (Litton) J. Marquardt (GSFC) G. Smith (Litton) A. Cudmore (GSFC) E. Stagmer (Litton) T. Miller (GSFC) S. Slegel (Raytheon) D. Molock (GSFC) S. Mann * L. Gaudaen (THC) L. Bashar (THC) J. Hengemihle (Microtel) J. Hengemihle R. Mason (Microtel) L. Bashar R. Mason * R. Mason * (Microtel) S. Mann * S. Mann (THC) J. D’Agostino K. Blackman A. Hawkins (THC) L. Bashar J. Hengemihle * EO-1 Flight Software Maintenance Functional Organization Chart
EO-1 Flight Software Maintenance Facility WARP Dev. PC EO-1 M5 (BB) RS 232 Generic RSN (BB) WARP M5 (BB) ICE Proms BC MV5 Dev. PC Generic RSN Dev. PC (PSE, Xband, HK) S/C 1773 Bus COMM RSN (BB) VirtualSat Bus Monitor Cmd & Tlm Simulator (CSC Sim) ACE RSN (BB) 1773 RT Sim Cmds & Tlm (WARP, ALI, AC ACE, X-band I/F, COMM & H/K RSNs) FEDS Ethernet ASIST
Special Topic: TSMs, Including Comprehensive Failure & Correction . . . Tom Feild EO-1 Systems Engineer, GSFC Code 568
Comprehensive Failure Detection and Correction • EO-1 employs 2 methods to autonomously detect fault conditions and take appropriate action to safe the observatory: • TSM/RTS System • A Telemetry Statistics Monitor (TSM) is a telemetry point or combination of points that are used to verify observatory health • A Relative Time Sequence (RTS) is a list of commands that can be executed in response to a hazardous condition • TSMs monitor spacecraft health and when they detect a fault condition they can execute an RTS and/or issue an event message • Runs on the ACDS Mongoose 5 • FDC System • The Fault Detection and Correction (FDC) System consists of software checks and corrective actions that are embedded in the flight software running on the various processors on EO-1
Failure Detection and Correction Philosophy • Philosophy is ‘Keep it Simple’ • Only conditions that threaten observatory health are addressed • Simplest ‘safe’ action is taken, often to power off the device whose health is in question • The TSM/RTS System is the primary method of detecting and correcting hazardous conditions on EO-1 • Except for certain instrument fault conditions, when one hazard has both a TSM/RTS action and an FDC action then the thresholds are set such that the TSM/RTS will trip first • All TSMs, RTSs, and FDCs will be tested prior to launch • Many ACS FDCs can only be tested on the high fidelity simulator • Many instrument FDCs only tested prior to instrument delivery • All TSMs/RTSs or FDCs will be retested after every new software load. Many are tested during the CPT.
Event Messages • The Observatory sends down ‘Event Messages’ to provide information on all significant events that occur on the observatory such as: • Changes in spacecraft configuration (e.g. data rates, filter tables, day/night transitions) • Anomalous events such as activated TSMs, RTSs, and FDCs • All Event Messages are stored in VR-2 • VR-2 is downloaded during each pass • Provides Flight Ops Team with immediate access to information on spacecraft health and autonomous actions • Event messages are generated by: • ALL TSM activations • All RTS calls by TSMs • Most FDCs
TSMs • Current version is TSM Rev G • Contains 33 TSMs (plus 17 monitor point TSMs) • Loaded on November 30, 1999 • 3 problems have been identified to date • 2 TSMs have tripped when not expected • 1 TSM did not trip when expected • Most already tested • 21 tested in special test • 6 to be tested during CPT (12/6 to 12/10) • 3 require retest • 3 require troubleshooting
(EEPROM) RTSs • There are 256 RTSs • 1 to 64 are loaded in EEPROM • 65 to 256 are RAM only • 40 to 55 are reserved for the MOC (Not used for fault correction) • 1 to 39 and 56 to 64 are used for Fault Correction (48 total) • 34 are currently used; 14 are spares • #5 and #39 are also used by the MOC. They may use others. • Current EEPROM version is RTS Rev E • Loaded on November 30, 1999 • No problems with RTSs have been identified • 32 tested in special test (All OK) • 16 to be tested during CPT (12/6 to 12/10) • 16 to be tested by the MOC (12/13 to 12/14)
FDCs • Additional Failure Detection and Correction is found in the various processors on EO-1 • These are called Fault Detection and Correction (FDC) routines • FDCs contained in ACDS, ACE RSN, PSE RSN, Comm RSN, X-Band RSN, WARP M5, Hyperion, ALI, and AC • Most are enabled at power-up and during nominal mission mode • The ACS FDCs are mode dependent and not all are used in any one mode • Most can be individually enabled or disabled • Some instrument FDCs cannot be disabled • Several are disabled for launch
FDCs (continued) • All have been tested • Many of the ACS FDCs can only be tested on the EO-1 hyperdynamic simulator • Most of the Instrument FDCs were tested before integration onto EO-1 • The rest have been tested on the observatory • When a new software load is performed, all FDCs in that software load are retested • ACS FDCs are tested on the EO-1 hyperdynamic simulator
Use By Flight Operations Team • FDCs • Autonomous. Cannot be called directly by Flight Ops • Updates require new software load • Most can be enabled and disabled • TSMs • Autonomous. Cannot be tripped directly by Flight Ops • Updates require table load or new M5 load • Can be enabled or disabled or placed in ‘watch’ mode • RTSs • EEPROM RTSs 40 to 55 and all RAM RTSs (65 to 256) are reserved for the MOC • Others, such as RTSs 5 and 39 are used by the MOC • EEPROM updates require table load or M5 load • All RTSs can be enabled or disabled
Summary • All RTSs and all but 2 TSMs will be tested by December 14, 1999 • 2 TSMs need special tests that may require a GSE change • Potential problems have been identified with 3 TSMs • Being investigated by Flight Software and Systems • After these items are completed the EO-1 Failure Detection and Correction System will be ready for launch • If software changes are made then re-testing will be required