Download
1 / 20
210 likes | 530 Views
Evolutionary Robotics. Evolution of Communication. Grid world: 200x200 squares (toroidal) 800 females, 800 males Females are deaf and immobile, but can signal Males are blind but can hear, cannot signal, but are mobile. F. F. M. F. M. M. Werner, G.M., Dyer, M.G. (1991)

E N D
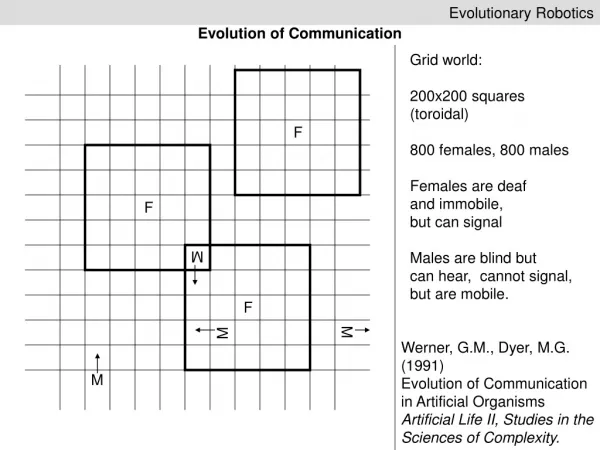
Evolutionary Robotics Evolution of Communication Grid world: 200x200 squares (toroidal) 800 females, 800 males Females are deaf and immobile, but can signal Males are blind but can hear, cannot signal, but are mobile. F F M F M M Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity. M
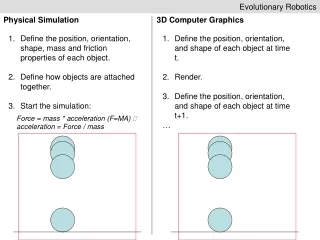
Evolutionary Robotics Evolution of Communication Each male and female starts with its own random neural network Female network: input: output: Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Evolutionary Robotics Evolution of Communication Each male and female starts with its own random neural network Male network: input: output: Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Evolutionary Robotics Evolution of Communication If male finds female (occupy same cell)… M F M, F F M F M M Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Evolutionary Robotics Observed evolutionary changes: 1. Males wandered randomly; females signaled randomly.
Evolutionary Robotics Observed evolutionary changes: 1. Males wandered randomly; females signaled randomly. 2. Males that stood still went extinct.
Evolutionary Robotics Observed evolutionary changes: 1. Males wandered randomly; females signaled randomly. 2. Males that stood still went extinct. 3. Males evolved to move in straight lines; ignore signals.
Evolutionary Robotics Observed evolutionary changes: 1. Males wandered randomly; females signaled randomly. 2. Males that stood still went extinct. 3. Males evolved to move in straight lines; ignore signals. 4. Males evolved to turn when on same row or column as female; females have evolved to signal this information; females that do not use this signal go extinct.
Evolutionary Robotics Observed evolutionary changes: 1. Males wandered randomly; females signaled randomly. 2. Males that stood still went extinct. 3. Males evolved to move in straight lines; ignore signals. 4. Males evolved to turn when on same row or column as female; females have evolved to signal this information; females that do not use this signal go extinct. 5. Females evolve to use this signal in more situations.
Evolutionary Robotics Evolution of Communication Control set of runs: Males were deafened; could not hear female’s signals. Q: Why the initial faster rate of improvement in the control case? Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Example of an evolved female signal / male response pairing. Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Example of a better evolved female signal / male response pairing. Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Evolutionary Robotics Evolution of Communication Example of a better evolved female signal / male response pairing. Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Evolutionary Robotics Female can emit one of four signals: 00, 01, 10, 11 For a given female signal, males can do 1 of 4 actions: 0: stay still 1: go forward 2: turn left 3: turn right Initial random responses of males Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Evolutionary Robotics Males can do 1 of 4 actions: 0: stay still 1: go forward 2: turn left 3: turn right The 547 males with response ‘1311’ responded to females that emitted only signals #1 and #2. Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Evolutionary Robotics Males can do 1 of 4 actions: 0: stay still 1: go forward 2: turn left 3: turn right The 127 males with response ‘1113’ responded to females that emitted only signals #3 and #4. Two groups of females; Males 1311 and 1113 only responsed to one of these groups. Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Evolutionary Robotics Males can do 1 of 4 actions: 0: stay still 1: go forward 2: turn left 3: turn right Q: How can we tell that from this figure? Q: What do you think will happen in subsequent generations?
Female can emit one of four signals: 00, 01, 10, 11 For a given female signal, Males can do 1 of 4 actions: 0: stay still 1: go forward 2: turn left 3: turn right Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Female can emit one of four signals: 00, 01, 10, 11 For a given female signal, Males can do 1 of 4 actions: 0: stay still 1: go forward 2: turn left 3: turn right Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.
Female can emit one of four signals: 00, 01, 10, 11 For a given female signal, Males can do 1 of 4 actions: 0: stay still 1: go forward 2: turn left 3: turn right Werner, G.M., Dyer, M.G. (1991) Evolution of Communication in Artificial Organisms Artificial Life II, Studies in the Sciences of Complexity.