Download
1 / 29
460 likes | 925 Views
Endüstriyel Otomasyon. Nedir ? Teorik Pratik Örnekler. Konular. Endüstriyel Otomasyonun Tanımı Tarihçesi Teorik Otomasyonda Bilinmesi Gerekenler PLC (Programmable Logic Controller) Mikroişlemciler, PIC Gömülü Bilgisayarlar, PC104 Pnömatik ve Hidrolik

E N D
Endüstriyel Otomasyon • Nedir ? • Teorik • Pratik • Örnekler
Konular • Endüstriyel Otomasyonun Tanımı • Tarihçesi • Teorik • Otomasyonda Bilinmesi Gerekenler • PLC (Programmable Logic Controller) • Mikroişlemciler, PIC • Gömülü Bilgisayarlar, PC104 • Pnömatik ve Hidrolik • Laboratuvarlarımızdan ve Sanayiden Örnekler • Referanslar ve Linkler
Otomasyon Normalde insanlar tarafından gerçekleştirilen ya da kontrol edilen görevlerin makinalar veya sistemler tarafından gerçekleştirilmesidir.
Endüstriyel Otomasyon Tarihi Otomasyonun tarihi çok eski değildir.İlk organize otomasyon endüstriyel devrimin sonrasında İngiltere’de 18.yy’ın ikinci yarısının sonlarında olduğu varsayılır.Son 200 yıldaki hızlı endüstriyelleşmede bazı önemli olaylar: • 1770 Endüstriyel Devrim ve mekanizasyon. • 1900 Henry Ford ve üretim hatlarının oluşması • Nümerik Kontrollu Takım Tezgahları, 1952 (ABD Hava Kuvvetleri, MIT). • Mikroçip bilgisayarların hızlı gelişimi, 1960‘ların sonları. • CNC (Bilgisayar Destekli Nümerik Kontrollu) Takım Tezgahları. • Endüstriyel Robotlar (1970‘ler). • Bilgisayar Ağları (1970‘ler). • Geleceğin Fabrikası:Tam otomatik Esnek İmalat Sistemleri 1990‘lar.
Teorik Kontrolun Ana Konuları • Kontrol Teorisi ve Uygulamaları • Kontrol Teorisi (Klasik,Durum Değişkenleri Yöntemi, Robust, Adaptif,Bulanık Mantıkla Kontrol v.b.) • Kontrol ve Sistem Dinamiği Eğitimi • Proses Kontrolü • Robotik • Otomasyon • Ayrık Olaylar ve Hibrit Sistemler • Sistem Performans Kriterleri • Ölçme Sistemleri • Gerçek Zamanlı Sistemler • Yazılım Mühendisliği • Ayrık Sistemler ve Ağlar • Yapay Sinir Ağları • Yapay Zeka
Girdi Çıktı Kumanda Elemanı Aktivasyon Elemanı Açık Devre Kontrol (Kumanda)
PC, PLC, PIC, Mikro İşlemci, PC104, Gömülü Bilgisayarlar, Elektronik Kartlar. . . Kapalı Devre Kontrol Motorlar, Silindirler, hareket elemanları. . . Girdi Kontrol Elemanı Aktivasyon Elemanı Çıktı + - Ölçme Elemanı Proses İvme, Açı, Hız, Akış,Encoders, Kuvvet, Yük, Pozisyon, Basınç, Sıcaklık, Eğim, Burulma, Titreşim Ölçüm Elemanları Üretim, sıcaklık kontrolü, kimyasal olaylar. . .
Kontrol Elemanı Bilgisayar, PLC, PIC, Mikro İşlemci, PC104, Gömülü Bilgisayarlar,Elektronik Kartlar. . .
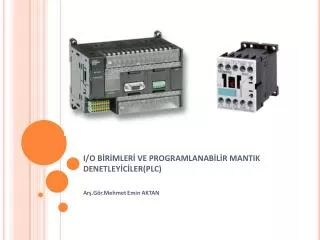
PLC (Programmable Logic Controller – Programlanabilir Kontrol Cihazı) • Algılayıcılardan aldığı bilgiyi kendine verilen programa göre işleyen ve iş elemanlarına aktaran mikro işlemci tabanlı bir cihazdır. • Endüstriyel bir ortamda görev yapmak üzere tasarlanmış digital prensiplere göre çalışan elektronik bir cihazdır.
PLC’lerin Uygulama Alanları • Sıra Denetimi ile İlgili Uygulamalar • Asansörlerin hangi katlara hangi sırayla uğrayacağının denetleme • Bir üretim bandında belirli bir konumda çalışan makinelerin sırasını belirleme • Hareket Denetimi ile İlgili Uygulamalar • Metal kesme • Metal şekillendirme • Montaj makinelerinde denetim sağlama • Süreç denetimi ile İlgili Uygulamalar • Sıcaklık, Basınç, Nem, Hız, Debi gibi parametrelerin denetlenmesini gerektiren uygulamalarda kullanılabilmektedir. • Veri yönetimi ile İlgili Uygulamalar • Bir işletmede yer alan her türlü süreçte oluşabilecek verilerin toplanması ve süreçlerin gerektiği şekilde yönlendirilmesi • Süreç içerisinde yer alan çeşitli makine ve benzeri teçhizat hakkında veri toplanması. Toplanan verilerin • Referans veriler ile karşılaştırılması • İncelenmesi • İzlenmesi • Raporlanması amacıyla başka bir aygıta aktarılması
PLC’lerin Ana Birimleri • Giriş Birimi • Kontrol edilen sisteme ait basınç, seviye, sıcaklık gibi algılayıcılardan gelen sinyaller giriş birimi üzerinden alınmaktadır. • Örneğin • Herhangi bir metali algılayan • Statik elektrik yapısıyla bir cismi hisseden • Işığı algılayan optik algılayıcılar gibi • İşlem Birimi • Giriş Biriminden aldığı bilgiyi kendine verilen programa göre işleyen ve sonucu çıkış bilgisi olarak aktaran ana işlem birimidir. • Çıkış Birimi • Ana işlem birimi giriş verilerini, belirlenmiş programa göre işler, daha sonra çıkış birimi ilgili denetim için gerekli kontrol sinyallerini üretir. • Örneğin; • Bir motorun çalışmasını sağlama, • Bir cismi itme ve çekme, • Işık yayma, • Alarm verme gibi • Programlayıcı Birim • İşlem birimi tarafından uygulanacak programların oluşturulduğu birimdir. PLC’leri programlamak için genellikle kişisel bilgisayarlar kullanılmaktadır.
PLC’lerin Avantajları • Esneklik • PLC programlarında değişiklik kolay ve hızlı bir şekilde yapılabilmektedir. Ayrıca PLC bellekleri arttırılabilir. • İşlem Hızı • PLC mantıksal ve aritmetik işlemlerden oluşan bir programı oldukça hızlı bir şekilde işletebilmektedir. • Görüntüleme • Bir PLC programı ve ilgili devrenin çalışması direk olarak monitörden izlenebilmektedir. Ayrıca arıza tarama yapılabilmekte ve geçmiş çalışma durumları sonradan izlenebilmektedir.
Mikroişlemci ve Temel Kavramlar • Mikroişlemci : Ön belleğine yazılan programı işleterek istenilen çıkışlara yönlendiren birimdir. Mikroişlemci veya sayısal bilgisayarlar üç temel kısımdan (CPU-Merkezi işlem ünitesi, I/O ve bellek) ve bunlara ek olarak bazı destek devrelerden oluşur. Her bir temel kısım en basitten en karmaşığa kadar çeşitlilik gösterir. • I/O (Giriş/Çıkış-Girdi/çıktı): Sayısal anolog ve özel fonksiyonlardan oluşur. Mikroişlemcinin dış dünya ile ilişkisini sağlar. Mikroişlemciye verilen ve işlemlerden alınan veriler bu hat üzerinden sağlanır. • CPU (Central Proccesing Unit-Merkezi işlem birimi): Sistemin kalbidir. Birim hesapları yapmak ve verileri idare etmek için 4.8 veya 16 bitlik veri formatında çalışır.
PIC Serisi mikroişlemciler firması tarafından geliştirilmis ve üretim amacı çok fonksiyonlu mantık uygulamalarının hızlı ve ucuz bir Mikroişlemci ile yazılım yoluyla karşılanmasıdır. PIC’in kelime anlamı:“Peripheral Interface Controller”dır. • Giriş-Çıkış işlemcisidir. İlk olarak 1994 yılında 16 bitlik ve 32 bitlik büyük işlemcilerin giriş ve çıkışlarındaki yükü azaltmak ve denetlemek amacıyla çok hızlı ve ucuz bir çözüme ihtiyaç duyuldugu için geliştirilmistir. PIC Ne Demektir?
Nasıl Programlanır? • PIC’ leri bilgisayarınıza seri,paralel port ya da USB ile bağlayıp; uygun yazılımı bilgisayarınıza yükledikten sonra Assembler ya da PicBasic ya da standart C gibi programlama dilleriyle Linux ya da Windows altında programlayabilirsiniz. Seri, Paralel Port veya USB • Bilgisayar • minimum 80486 • Linux, DOS veya • Windows yüklü • Gerekli Yazılım • (ücretsiz, hobi • sitelerinden indirebilirsiniz) Pic Programlama Kartı PIC
PC104 Ne Demektir ve Uygulamaları • PC104,adını bilgisayarın kısaltması PC’den ve diğer kartlarla yaptığı bağlantıların 104 pinden olmasından dolayı 104’ten almaktadır. Gömülü bilgisayardır. Boyutları ISA, PCI ya da diğer bus’lardan ve anakartlardan çok daha küçük boyuttadır(9.15cm x 9.65). Güç gereksinimleri ve sinyal sürücü gereksinimleri gömülü sistemlerin ihtiyaçlarını sağlayacak değerlere indirgenmiştir. • PC104 form faktörü Ampro Computers tarafından Kaliforniya’da 1980’lerin sonlarında geliştirilmiştir. Özellikleri 1992’depopülaritesini arttırmak amaçlı olarak yayımlanmıştır.Şu an 150’den fazlasatıcı PC104 ve aksesuarları üretmektedir.
PC104 Ne Demektir? • Modülller Bilgisayar modülü olarak düşünülen herşey PC104 Modülü olarak bulunabilir. CPU, seri I/O portları, video kontrol kartları, ethernet kartları gibi genel modüllerden, GPS alıcıları, araç güç kaynakları, kablosuz iletişim gibi özel modüllere kadarher çeşit modülü bulmak mümkündür. Modüller, basitçe 104 pin olan bağlantıya direkt olarak takılarak kullanılabilir. • UygulamalarPC104 temelli sistemler, fabrikalar, laboratuvarlar, araçlarda, kısaca bilgisayarla kontrol edebileceğiniz ama sağlamlık, devamlılık gereken ve boyutların sorun olduğu her yerde kullanılabilir. Kontrol için gerekli modüllerin üzerinde gömülü olarak bulunması fiyat açısından normal bir bilgisayardan çok daha ucuz olmasını sağlar.
Hidrolik - Pnömatik Ne Demektir? “Pnömatik, gaz (genelde hava), hidrolik ise sıvı akışkan gücü ile iş yapmaktır.”
Pnömatik Sistemin Temelleri Kompresör solenoid valf silindir Pnömatik hortum rezervuar
Pnömatik Sistem Özellikleri • Ağırlık • Silindirler, motorlardan çok daha hafiftir • Basitlik • Pnömatik Komponentlerin montajı, Motorların montajından çok daha basittir. • Lineer harekette, kramayer dişliden çok daha basit ve uzun ömürlüdür. • Zorlandıklarında yanmazlar • Silindirler, hareketteyken durdurulduklarında yanmazlar. • Dezavantajları • Lineer harekette avantajlıyken, dönüş hareketinde başarısızdırlar. • Eğer tüm sistem konuşlandırılacaksa, ağırlık bir avantaj değildir. (kompresör, rezervuar, basınç sensörleri,regulatör...)
Pnömatik mi? Hidrolik mi? Genelde; Hassasiyet ve güçHidrolik’in; hız ve ucuz komponentPnömatik’in seçilme nedenleridir.
Pnömatik Komponentler 1 - Kompresörler 2 - Valfler 3 - Şartlandırıcılar 4 - Rezervuarlar 5 - Sensörler 6 - Silindirler 7 - Akış Kontrol Elemanları 8 - Bağlantı Elemanları
Pnömatik Komponentler 1-Kompresörler (pistonlu,vidalı) 2-Valfler
Pnömatik Komponentler 3-Şartlandırıcılar 4-Rezervuarlar
Pnömatik Komponentler 5-Sensörler 6- Silindirler
Pnömatik Komponentler 7- Akış Kontrol Elemanları 8- Bağlantı Elemanları
Referanslar: • Ders Notlarım • http://www.deu.edu.tr/mechatronics • Pnömatik ve Hidrolik kurs notları. • http://www.festo.de • http://www.entek.com.tr/smcdidaktik/homepage • 2.htmDorf, Bishop. Modern Control Systems • http://www.powertransmission.com/pages/actuators.htm • http://www.control.com • http://www.aromat.com • PLC (Programlanabilir Kontrol Cihazı) Tabanlı Sistemlerin İnternet Üzerinden İzlenmesi, Derya Birant, Alp Kut. • http://www.microchip.com • http://www.pc104.org • http://www.pc104.com • http://www.endtas.com • http://www.elektronica.8m.com/pic.htm • Hutchinson and Karsnitz • Pneumatics by Steven Dungan and Keith Wiseman • Pneumatics byIan Mackenzie • http://www.vema.com.tr • http://sensors-transducers.globalspec.com
Ar.Gör. Aytaç GÖREN Dinlediğiniz için teşekkürler. . .Sorularınız ? Dokuz Eylul Üniversitesi,Makina Mühendisliği Bölümü,Otomatik Kontrol ve Mekatronik Laboratuvarları