Download
1 / 13
170 likes | 542 Views
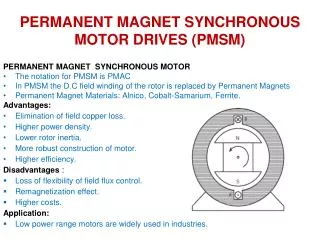
Control of PMSM drives for traction applications. Speaker : Magyari Györgyi-Karola. PMSM drives classification brushless a.c. drive controls control loops with PID-type controllers rules for the controllers settings conclusions. Contents. with respect to current waveform

E N D
Control of PMSM drives for traction applications Speaker : Magyari Györgyi-Karola
PMSM drives classification brushless a.c. drive controls control loops with PID-type controllers rules for the controllers settings conclusions Contents
with respect to current waveform voltage-frequency correlation motion sensor presence PMSM drive classification
PMSM drive classification From the point of view of the current waveform : • rectangular current control brushless d.c. motor dive • sinusoidal current control brushless a.c. motor drive Rectangular and sinusoidal current control
Brushless d.c drives: q=1 concentrated coil stator windings surface magnets PMSM drive classification Brushless a.c drives: • q≥1 • distributed coil stator windings • surface and interior magnets
scalar control (V/f): a damper cage on the rotor is required, there are no motion sensorslow dynamics applications vector control (current or current and voltage): faster dynamics applications direct torque and flux control Brushless a.c. drive control
Brushless a.c. drive control Basic vector control of PMSM: 1 - with motion sensor 2 - sensorless
Control loops • to control currents, speed, position in PMSM drive • heavily affects the performances of the drive system • to optimize the time domain step response of the system or the performances in the frequency domain PI-type controller
symmetrical optimum (SO): a PI controller is designed to control a system with an I-element absolute value optimum (AVO): a PI controller operates in a control system with one long delay time and a sum total of smaller delay times Rules for the control settings
each control loop can be adjusted efficiently and independently multiple delay times can be reduced or canceled for the higher level controller with compensation in a lower level disturbance variables will be corrected in lower level control loops internal control variables can be limited through the command variable each additional control loop introduces delay time to the higher level, so the changes in the command variables need more time to be corrected Conclusions