Download
1 / 21
210 likes | 325 Views
Convegno Italiano di Logica Computazionale. A Master-Slave Architecture to Integrate Sets and Finite Domains in Java. F. Bergenti E. Panegai G. Rossi Università degli Studi di Parma. Bari, 26-27 Giugno 2006. Outline of the talk. Aims:

E N D
Convegno Italiano di Logica Computazionale A Master-Slave Architectureto Integrate Sets and Finite Domains in Java F. Bergenti E. Panegai G. Rossi Università degli Studi di Parma Bari, 26-27 Giugno 2006
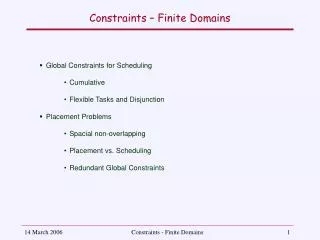
Outline of the talk • Aims: • Implement and validate the integration of JSetL (a set solver) and JFD (a finite domains solver); • Find out a generic architecture approach for a cooperation between constraint solvers; • The Master-Slave architecture; • Case study: JSetL+JFD; • Conclusions and future work.
Introduction • Solvers are normally implemented on the basis of more or less explicit tradeoffs between: • Capabilities: the kinds of constraints they manage and under which assumptions; and • Performances: the adopted strategies, heuristics and optimizations. • Often single solvers cannot be used on hybrid problems. Idea: Combine several constraint solving techniques to solve problems that none of the single solvers can handle alone. CILC 06 – Bari, 26/27 Giugno 2006
Meta-solver Interface Solver 1 Solver 2 Solver n Introduction • A common architectural outline can be found in many frameworks and architectures that explore the cooperative integration of constraint solvers: • A top level of meta-resolution (namely a meta-solver); • A set of constraint solvers; and • An interface between the meta-solver and the object-level solvers. CILC 06 – Bari, 26/27 Giugno 2006
Meta-solver Interface Solver 1 Solver 2 Solver n Solver 1 Interface Solver 2 Solver n Introduction • We always need a layer of meta-resolution? Often this layer implies implementation efforts to realize functionalities already present in the solvers. • The master-slave (M-S) approach: No meta-solver One of the solvers is opportunely selected and promoted to the role of master.
Introduction • The case study integrate two Java solvers, namely JSetL and JFD, into an added-value Java constraint solver capable of exploiting: • The full expressive power of JSetL, with its inherent flexibility and generality; and • The efficiency of JFD in treating finite integer domains variables. • Constraint solving algorithms are basically the same exploited in CLP(Set+FD). Moving from a logic programming framework, to an OO programming context (Java) causes some implementation decisions to become more evident.
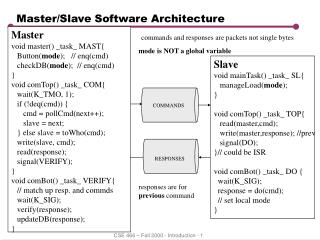
M-S Constraint Solving • The general architecture: • Each solver is responsible for a predefined set of constraints and is equipped with a private constraint store (conjunction of atomic constraints). • The main task of each solver is to try to reduce any conjunction of atomic constraints to a simplified (irreducible) form. • One solver is selected as Master solver, all the others are Slaves (Slaves are black boxes). • The master is in charge of distributing tasks to, and gathering results from, the slaves. • The constraint distribution policy is based on a fixed a-priori mapping.
M-S Constraint Solving : Selection of Master • Good selection of the master: • The master should provide a constraint language that subsumes the union of the languages of all slaves; • The performances: slaves should perform better than the master in their reference domains; • The support for constraint programming abstractions, e.g., logical variables and nondeterminism; • The possibility of extending the selected solver to integrate master-specific procedures (e.g., constraint dispatching, result processing etc.); and • The public functionalities provided to programmers.
M-S Constraint Solving : Communication • At first stage the master needs to communicate constraints. • Allocation of an atomic constraint C=op(t1,...,tn): • (MASTER) If C is a constraint of the master and S=Ø, then the master solves it; • (SLAVE) If C is not a constraint of the master and SØ, then C is posted to all slaves in S; • (BOTH) If C is a constraint of the master and SØ, then the master posts C to all slaves in S and then solves it; or • (UNKNOWN) If C is not a constraint of the master and S=Ø, the allocation fails, i.e., the constraint is unknown.
M-S Constraint Solving : Communication • Communication second stage: Interface that slave solvers provide: • add(C)where C is a slave constraint to be added to the constraint store of the slave; • get_constraints() that returns the conjunction of constraints that are present in the store of the slave; • solve(B) where B is a value from an enumerative type used to specify which solving process is requested.
M-S Constraint Solving : Communication • Communication third stage: we need other glue functions for translate and filter constraints: • master_to_slave(Slave,C)translates a master constraint C to the corresponding slave constraint; • slave_to_master(Slave,D) translates a slave constraint D to the corresponding master constraint; • which_type(C) that allows C to be classified as belonging to one of the four types of constraints MASTER, SLAVE, BOTH and UNKNOWN; and • which_slave(C) that maps C to a possibly empty set of slaves that can handle it.
General Constraint Solving Procedures • The master's procedure for constraint solving: procedure master_solve(Constraint Store) repeat reset(Store); step(Store) until is_final_form(Store) end procedure; • Actions are repeated until the solving process terminates successfully or until it fails. • The process terminates successfully when no further constraint can be reduced or allocated to slaves and when all results are gathered from the constraint stores of slaves. • The process fails when the master, or any slave, detects an inconsistency and no further nondeterministic choices are left open.
General Constraint Solving Procedures procedure step (Constraint Store) C = extract(Store); // Constraint C Selected_Slaves = Ø; while C true do T = which_type(C); Slaves = which_slave(C); // Set Slaves Selected_Slaves = Selected_Slaves υ Slaves; // Set Selected_Slaves if T == SLAV E or T == BOTH then for all Slave Slaves do Slave.add(master_to_slave(Slave, C)) end for if T == BOTH or T == MASTER then handle_constraint(Store,C) C = extract(Store); end while; for all Slave Selected_Slaves do Slave.solve(REDUCE); slave_try_next(Slave, Store) end for; end procedure;
Nondeterminism Management • The master and the slaves solvers can be sources of nondeterminism. • The slaves interface modules further provide the following methods: • next_solution() to explore the next nondeterministic alternative that a previous call to solve might have left open. • save() that returns a snapshot of the current state of computation of a slave; and • restore() that restores a previously saved state.
General Constraint Solving Procedures • Procedure used to explore nondeterministic choices left open by slaves: procedure slave_try_next(Solver Slave, Constraint Store) Constraint D; either D = slave_to_master(Slave, Slave.get_constraints()); if D == false then fail else insert(Store,D); end if; orelse// try next nondeterministic alternative Slave.next_solution(); slave_try_next(Slave, Store) end either end procedure;
Case Study: JSetL+JFD • JSetL is a library that endows Java to support general purpose declarative programming. In particular, JSetL provides: • logical variables, • unification, • list and set data structures, • constraint solving, and • nondeterminism. • JFD is a library that provides constraint solving techniques for variables with finite domains.
Case Study: JSetL+JFD procedure step (Constraint Store) ... // initialization while C true do T = which_type(C); Slaves = which_slave(C); // Set Slaves Selected_Slaves = Selected_Slaves υ Slaves; // Set Selected_Slaves if T == SLAV E or T == BOTH then for all Slave Slaves do Slave.add(master_to_slave(Slave, C)) end for if T == BOTH or T == MASTER then handle_constraint(Store,C) C = extract(Store); end while; for all Slave Selected_Slaves do Slave.solve(LABEL_ALL); slave_try_next(Slave, Store) end for; end procedure;
Case Study: JSetL+JFD • The handle_constraint procedure of JSetL+JFD: procedure handle_constraint(Constraint Store, Constraint C) if C == op (o1,o2) then member(Store, C) else if C == op=(o1,o2) then equals(Store, C) else if ... then else if C == next then slave_try_next(Store, C) // Unroll nondeterministic choice end if end procedure
Case Study: JSetL+JFD • The procedure used to explore nondeterministic choices left open by slaves: procedure slave_try_next(Constraint Store, Constraint C) Constraint D; if C.get_alternative() = 0 then add_choice_point(next); // save computation state D = slave_to_master(jfd, jfd.get constraints()); if D = false then fail else insert(Store,D) end if else jfd.next solution(); . try next nondeterministic alternative insert(Store, next) end if end procedure
Case Study: JSetL+JFD • Nondeterminism is confined to constraint solving: procedure member(Constraint Store, Constraint C) if C = op(o1,Ø) then fail else if C = op (o1,X) then insert(Store, op=(X, {o1 |N})) else if C = op (o1, {o2 | s}) then if C.get_alternative() = 0 then add_choice_point(C); // Save nondeterministic choice insert(Store, op=(o1, o2)) else insert(Store, op2(o1, s)) end if else if ... then end if end procedure
Conclusions and Future Work • Extend constraints management and functionalities of JSetL+JFD. • Tests on solving processand labeling. • Tests with more slaves (i.e Solver for multisets). • Application on Configuration Problems. • Download at: http://www.math.unipr.it/~gianfr/JSetL/