Download

1 / 101
1.14k likes | 1.56k Views
FIELDBUS. Industriell datakommunikation. Luca Beltramelli. Email: luca.beltramelli@miun.se. References. Book: Practical Industrial Data Communications by Reynders, Deon Mackay, Steve Wright, Edwin. Program. 02/05/2016 Seminar I: Intro to Fielbus and Industrial Automation

E N D
FIELDBUS Industrielldatakommunikation Luca Beltramelli Email: luca.beltramelli@miun.se
References Book: Practical Industrial Data Communications by Reynders, DeonMackay, SteveWright, Edwin Industriell Datakommunikation - Fieldbus
Program 02/05/2016 • Seminar I: • Intro to Fielbus and Industrial Automation • Overview of fieldbus technologies (Part 1) 03/05/2016 • Seminar II: • Overview of fieldbus technologies (Part 2) 04/05/2016 • LAB: • Simulating Fieldbus using Matlab and TrueTime Industriell Datakommunikation
What is a Fieldbus? Fieldbuses are real-time networks for sensors and actuators. Used for the communication among sensors, actuators and controllers Industriell Datakommunikation - Fieldbus
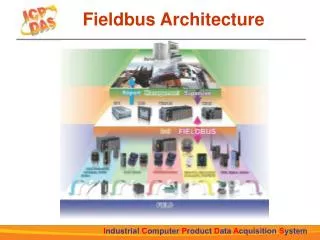
The Automation Pyramid Industriell Datakommunikation - Fieldbus
Fieldbuses: the beginning Traditionally in industries the communication was completly analog Moving to digital communication brings many benefits: • Immunity to noise; • Less cabling; • Better Diagnostic; Fieldbus replace the traditional 4 – 20 mA analog technology. 20 [mA] 4 Q: Why 4-20 mA? Measurement Range Industriell Datakommunikation - Fieldbus
4-20 mA vs Fieldbus Industriell Datakommunikation - Fieldbus
Fieldbuses: field devices One of the key requirements for the adoption of fieldbus is the distribuited intelligence. To access the fieldbus sensors and actuators are required to implement a communication stack. Smart Sensors: • Computetion capabilities; • Communicate in a digital way; • They use a communication standard (at least layers 1 and 2 of ISO/OSI); Industriell Datakommunikation - Fieldbus
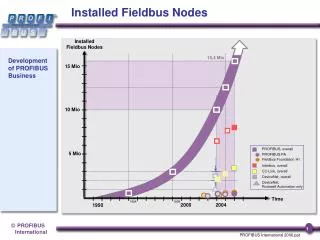
Predecessors Proprietary solutions International Standards Fieldbus Evolution From the first proprietary solutions (’80) to the actually used standard (’90) 1991 … 1996 1969 1979 First PLC (Modicon 084) MODBUS CAN HART Profibus FMS/DP/PA FOUNDATION fieldbus Industriell Datakommunikation - Fieldbus
Wireless Networks Industrial Ethernet Fieldbus Evolution From the first proprietary solutions (’80) to the actually used standard (’90) 2001 … 2006 2010 2007 2009 EtherCAT (2003) Eth/IP (2001) Profinet (2004) SafetyNET (2006) … Release of WirelessHART Release of ISA100.11a Introduction of IO-Link Industriell Datakommunikation - Fieldbus
Fieldbus and the OSI Model Implementation Model OSI Model Industriell Datakommunikation - Fieldbus
Fieldbus: the applications Industriell Datakommunikation - Fieldbus
Safety • Redundancy, Check codes, very low data error rate Determinism • Synchronized communications, TDMA Wireless networks are considered unreliable and, up to now, are used for entertainment and extravehicular communications IEEE 802.11p for data exchange between high-speed vehicles (V2V) in the licensed ITS band of 5.9 GHz (5.85-5.925 GHz). Examples: LIN – very simple protocol (e.g. window automation) CAN – CAN version with TDMA (e.g. ABS) FlexRay – New (BMW, Audi, Mercedes …), increases baud rate with respect to CAN (up to 10Mbytes/s) and adopts a TDMA with dynamic slots assignment. FIELDBUS FOR AUTOMOTIVE Industriell Datakommunikation - Fieldbus
The low-cost is mandatory, non-invasive and mobile sensors • could be the future (wireless fieldbuses) • Primary needs: low-cost, simple installation, auto-configuration • There are a lot of proprietary solutions: • CAN – based solutions (different application layers) • Some emerging Ethernet-based solutions(security and costs problems) • EIB, EHS and Batibus converge into Konnex (KNX) (ISO/IEC 14543-3,EN50090) • • European Standard (Siemens, ABB, Bticino, Vimar, etc.) • • Wired and wireless • LONWorks • • Widespread in USA • • Supported by electronic devices (Neuron Chips produced by Toshiba, Freescale, Cypress) FIELDBUS FOR HOME AUTOMATION Industriell Datakommunikation - Fieldbus
Safety is mandatory (particularly in chemical, oil, industries,…) • • High availability (redundant system) • • Reduce wiring (long distances) - the bus also powers the devices • Speed is not important • • Cycle time are in the order of several hundreds of ms • • Timestamp is important in case of fault (resolution ~ 100 ms) • There are only two big players: • • PROFIBUS PA • • FIELDBUS FOUNDATION(it has local loop control between devices) • They use the same physical layer (Manchester, powered, 31.25kbaud) • but they are totally different at the data layer. • Wireless can be used for non critical processes, as it reduce wiring and • allow a range extension by suitable network topologies (mesh) FIELDBUS FOR PROCESS AUTOMATION Industriell Datakommunikation - Fieldbus
The main goals are: • Fast and low-cost • High rejection to noise • Safety (e.g.protection of human operator) Speed can be very important • Reduced communication times means more products, i.e. higher gain… • Motion control (motor drives) need isochronous communication More than 20 fieldbuses for Factory Automation • PROFIBUS DP is the most diffused but holds only the 15% of the market (RS485, max 12Mbit/s) • DeviceNet, CANOpen, use CANbus (max 1Mbit/s) Factory environment is hostile for wireless technology (metal, walls,…) FIELDBUS FOR FACTORY AUTOMATION Industriell Datakommunikation - Fieldbus
The Ideal Fieldbus: some characteristics • Transfers a “big number” of small length values; • Supports real-time traffic (Upper bounded response times, ex. 1ms..1s); • Operates in hazardous environments (high temperature, vibrations, etc.); • Is robust and easy to install; • Has high availability (e.g. redundant architectures); • Has continuous supervision and diagnostic; • Manages long distances (100m .. 4 km); • Has good data transmission rate (e.g. 50 kbit/s … 5 Mbit/s); • Supports clock synchronization (e.g. milliseconds up to microseconds); • Manages non real-time traffic for maintenance and diagnosis. Industriell Datakommunikation - Fieldbus
Fieldbus: the topology Fieldbus daisy chain topology Tree topology Industriell Datakommunikation - Fieldbus
Fieldbus: distributed measurements • In Industry to ensure good control and monitoring actions, sensor nodes should… • Be synchronized • Synchronization protocols • Delay • Jitter • Be identified and localized • Identifier for each sensor • Localization of moving sensor • Be qualified • Uncertainty measurement • Status report Industriell Datakommunikation - Fieldbus
Fieldbus: Measurement and Control • Measurement • Data require a time reference (timestamp) • Loop Control • Delay must be limited (deterministic transmission) Industriell Datakommunikation - Fieldbus
Fieldbus: Networked Control System (NCS) Process Sensor Actuator Communication Network Controller Close loops in Process Automation • Process (temperature, humidity,…Tcycle> 1s) Close loops in Factory Automation • Motion (positioning, speed, torque… Tcycle< 1 ms) Industriell Datakommunikation - Fieldbus
Fieldbus: a complex scenario Seriplex Ethernet Profibus-FMS CAN AND MANY OTHERS !!! Batibus WorldFIP FlexRay Profibus-PA CANOpen PROFInet EtherLink Profibus-DP FieldBusFoundation Sercos BacNET ControlFIP Hart IEEE 802.11 ModBus-RTPS DeviceNet M-Bus Modbus Profisafe ControlNet Ethercat Industriell Datakommunikation - Fieldbus
HART (Highway Addressable Remote Transducer) • Developed in 1980, from 1990 is an open communication technology for process automation. • Enables the transmission of digital information superimposed on analog 4-20 mA communication. • The 4-20 mA is used for transmitting the analog data from sensor in the field. Industriell Datakommunikation - Fieldbus
FSK modulation ‘0’ – 2200 Hz ‘1’ – 1200 Hz “Analog” for sensing information, digital for diagnostics The average value of the Frequency Shift Keying (FSK) modulation is zero, the analog communication is unaffected by it. Industriell Datakommunikation - Fieldbus
HART: Point to Point communication Q: can we use analog communication? HART: Multi-point communication NOT HERE Industriell Datakommunikation - Fieldbus
HART Telegram • Three classes of commands: • Universal Commands • Common Practice Commands; • Device-Specific Commands. Industriell Datakommunikation - Fieldbus
Reference • Official Website • Practical Industrial Data Communications - Ch. 18a Industriell Datakommunikation - Fieldbus
Application layer (Layer 7) messaging protocol • Developed by Modicon in 1980 • Mainly Used in SCADA system • Master-slave protocol • Communication is initiated by the Master (Client) • Slaves (Server) communicate only to the Master • One communication at the time (Unicast or Multicast) • Peer-to-peer • UART (RS232, RS485) • 1 master, <248 slaves modbus.org/docs/PI_MBUS_300.pdf Industriell Datakommunikation - Fieldbus
Modbus message Frame Communication based around a Query-Response cycle The function code in the query tells the addressed slave device the action to perform. (ex. read Input Registers, Force Single Coil,Read Coil Status ) Industriell Datakommunikation - Fieldbus
Two serial transmission mode (no coexistence): • ASCII mode • 1 byte -> 2 char (0-9, A-F) • Error Check -> LRC • Bits per Byte: • RTU mode • 1byte -> 8 bit (0 … 255) • Error Check -> CRC • Bits per Byte: Industriell Datakommunikation - Fieldbus
Reference • Modbus over serial line • Reference Guide • Official Website • Practical Industrial Data Communications - Ch. 8a Industriell Datakommunikation - Fieldbus
Controller Area Network (CAN) Developed in ’85 by Bosch for automotive • Random access bus (32 users, 1Mbaud @ 40m) • Multi-master bus • CSMA/CA • Asynchronous Serial Bus • 4 frames: DATA (data exchange), REMOTE (request to send data), ERROR (error signaling, OVERLOAD (temporary unavailable) Industriell Datakommunikation - Fieldbus
The CAN standard includes: • Physical layer • Data-link layer • • Some message types • • Arbitration rules for bus access • • Methods for fault detection and fault confinement Industriell Datakommunikation - Fieldbus
Phy layer • Maximum bitrate 1Mb/s. • The bitrate depend on the bus length. • The bitrate is limited to sense the collision between distant nodes. • Twisted pair cable, differential transmission Industriell Datakommunikation - Fieldbus
Bit Coding: NRZ (does not ensure enough edges for synchronization) • Bit Stuffing • “open-collector like”, that is “0” level wins • Automatic bus release if collision occurs and retransmission (CAN, …) (Profibus, Ethernet …) Industriell Datakommunikation - Fieldbus
The Arbitration Field contains a 11-bit identifier for the data. Data with higher priority have the MSBs at ´0´ and win the arbitration. Higher Layer Protocols • CANOPEN • DEVICENET • CAN Kingdom • … Industriell Datakommunikation - Fieldbus
Reference • Official Website Industriell Datakommunikation - Fieldbus
PROFIBUS (Process Field Bus) Three versions of the standard: • Profibus FMS (1991) • PLC-PLC, PLC-SCADA, PLC-Field device (complex, obsolete) • Profibus DP (1994) • Simpler than FMS, normally 1 master (PLC), several slaves (field devices) • Market leader • Profibus PA (1995) • Different and more robust physical layer (IEC 61158-2) Industriell Datakommunikation - Fieldbus
Profibus: the actors • DPM1 (Master Class 1):central controller which exchanges data with the connected I/O devices (slaves). • Determines the baudrate. • Handles the Token; • Several class1 masters are permitted, typical devices are PLC, PC. • DPM2 (Master Class 2): diagnostic and startup tool, typically a configuration tool, can control one slave at a time. • Slave:passive station which acknowledges messages or answers per request Industriell Datakommunikation - Fieldbus
At least one master is mandatory. • Profibus networks allow for multiple masters. • In total 127 stations can be addressed Industriell Datakommunikation - Fieldbus
The master with the token can make use of communications to address any other stations (masters and slaves). Master-Slave Communication DP Slave State Machine • The slave is in one of four possible states: • Power_ON / Reset • Wait for Parameters • Wait for Configuration • Data Exchange • Cyclic data exchange between a Class 1 master and a DP slave can only take place if the DP slave is in the data-exchange state (DXCHG). Industriell Datakommunikation - Fieldbus
A device can consist of multiple functions: • a simple master master communication via the master - slave combination; • whenever one master has the token the other PLC can be a slave to this master. Master-Master Communication • Using a DP-DP gateway: • combination of two mono master systems; • simple data exchange between the two masters up to 244 byte. Industriell Datakommunikation - Fieldbus
Profibus transmission media • RS-485 • Twisted cable • Baudrate 9.6 kbit/s to 12 Mbit/s • Maximum 32 devices • Distance can be extended by means of repeaters • 12 Mbit/s @ 100 m • 187.5 kbit/s @ 1000 m • Fiber Optic • Single and Multi Mode • Baudrate 9.6 kbit/s to 12 Mbit/s • Distance can be extended by means of repeater to 100 km • MBP-IS • Twisted cable • Fixed Baudrate of 31.25 kbit/s • Maximum distance 1900 m • Between 10 and 32 devices per segments • Power Supply directly from the bus Industriell Datakommunikation - Fieldbus
Fieldbus Data Link • 4 types of frames • Identified by the value of the first byte (Start Delimiter) SYN: 33 bits at 1 SD1 10h 01101000 SD2 68h 10100010 SD3 A2h 00010000 SD4 DCh 11011100 Hamming Distance equals to 4 Note: SD3 practically unused Industriell Datakommunikation - Fieldbus
Message SD2 (data exchange) SD2 Start Delimiter (68H) LE Information length (from 4 to 249) LEr Information length repeated (Hamming distance = 4) DA Destination address SA Source address FC Frame Control DATA UNIT Data field (max length 246) FCS Frame Check Sequence ED End Delimiter (16H) L Information length (L = from 4 to 249) Industriell Datakommunikation - Fieldbus