Download
1 / 8
80 likes | 199 Views
Multistep Runs with ROD Crate DAQ. Murrough Landon, QMUL. Outline: Overview Implementation Comparison with existing setup Readout Status ModuleServices API change Next Steps Demo?. ROD Crate DAQ Controller. Derived from ROS Software

E N D
Multistep Runs with ROD Crate DAQ Murrough Landon, QMUL • Outline: • Overview • Implementation • Comparison with existing setup • Readout • Status • ModuleServices API change • Next Steps • Demo?
ROD Crate DAQ Controller • Derived from ROS Software • Application framework implementing the run state transition skeleton • Implemented as set of plugin libraries, configured via database • Set of ReadoutModules with DataChannels responsible for reading data (analogous to ROBins with input links). • L1Calo implementation • configL1Calo package: schema and data access library providing pluging for our L1CaloReadoutModule subclass • readoutModule package: implementation of module and data channel classes and a “crate” class for common actions at the start of each state transition: • L1CaloReadoutModule • L1CaloDataChannel • CrateSetup • dbFiles package: script to generate RCD DB objects Murrough Landon, QMUL
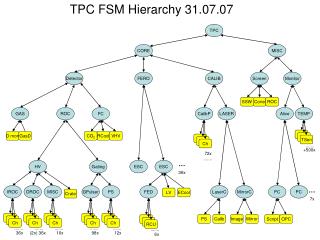
RCD Implementation Murrough Landon, QMUL
RCD Controller: Pros and Cons • Pro • Standard, supported solution for detectors ROD (and other) crates • Hopefully less maintenance and easier use of new features • Implements readout/monitoring/histo publishing within the framework, also interrupts, database access (not COOL yet?) • Allows multiple readouts during the RUNNING phase of multistep runs (compared with one readout per step at present) • Con • Database requires lots of objects: generate them all from the hardware description (hw/*_crates.data.xml) but then harder to customise individual crates - eg to add applications such as “kickers” • Less flexible: no direct access to RC skeleton • Represents a change from what we are used to Murrough Landon, QMUL
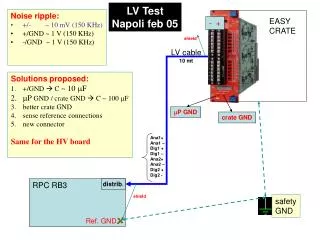
Readout Data • Software • Separate crate_readout program no longer required • Start/stop readout should be better synchronised with state transitions • Format • Data from one crate looks like a ROS fragment, contains one ROB (and ROD) fragment per module • Using “TDAQ beam crate” source ID at the moment (0x700000) • Should add crate ID to this at ROS level, crate and module IDs at ROB/ROD level? • No need for existing one word buffer header (or extended crate header?) but keep rest of the formatted buffer contents • Monitoring • Use -k RCD -v rcd-<crateName> • Existing standalone monitoring programs need to use eformat to locate ROD fragments within the ROS fragment • But GNAM can easily provide a vector of ROD fragments Murrough Landon, QMUL
Present Status • Implemented and tested (OK) • Actions at run state transitions (USA15 and RAL) • Publishing status to IS • One readout at state transitions and many readouts when RUNNING • Problems • See a few “ROS” errors building events (high rate?) • When running, need a way to know if a new event is available • (at present the DataChannel just sleeps a bit) • To be done • Test elsewhere than USA15 (eg with more modules at RAL) • Modify monitoring programs to slightly different packaging of formatted readout buffers Murrough Landon, QMUL
ModuleServices API Change? • Issue • DataChannel has poll() method to see if data is available • (alternatively can use interrupts) • If true, RCD will call DataChannel::getNextEvent() • But at the moment the DataChannel has no way of knowing if PPM or ROD (or DSS?) has a new event available (for other modules its not a problems as status information is always available) • Suggestion • Add a generic isDataAvailable() method to moduleServices API • Only needs a real implementation in PPM, ROD (and DSS?) Murrough Landon, QMUL
Next Steps • Soon • More tests, adapt PPM monitoring and try Tile tests • Try out at other sites, after a few dbFiles mods: • partitions: Partition PartitionRcd • segments: partition_segments cut down partitionRcd_segments • Include partition_genrcd.data.xml instead of existing crate segments • Fairly soon • Implement moduleServices API change, along with connect() method in preparation for forthcoming run control changes • Not long after • Would like to move to RCD as our standard • NB simulation controller remains in the old style for now Murrough Landon, QMUL