Download

1 / 8
80 likes | 185 Views
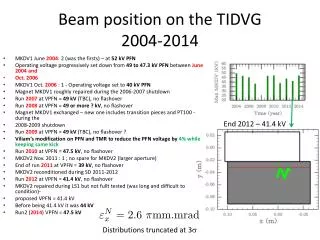
Beam Position Reconstruction. Pengjia Zhu 02/15/2012. Solution. Solution. bcm signal split problem Solution. BCM electronic. Upstream. Downstream. BCM Receiver. Left Happex Crate. V2F. Right Happex Crate. 1. 2. 3. 4. reflection signal. Happex. Happex. Happex. Happex.

E N D
Beam Position Reconstruction Pengjia Zhu 02/15/2012
Solution Solution bcm signal split problem Solution BCM electronic Upstream Downstream BCM Receiver Left Happex Crate V2F Right Happex Crate 1 2 3 4 reflection signal Happex Happex Happex Happex V2F V2F reduce asymmetry resolution ….
Beam Position Reconstruction • Unrastered beam reconstruction Just using BPM information to get beam position in target Also can be used for checking beam size while raster on THaG2PUnrasteredBeam class in doing this job • Rastered beam reconstruction Using BPM and raster magnet current information to get beam position in target THaG2PRasteredBeam class doing this job
Unrastered beam reconstruction Procedure • 1.BPM Calibration • 1. Change the chicane setting to straight beamline, turn off target field, chicane field, septum field • 2. Use 2 harps to get the absolute position in 2 harps in hall A coordinate • 3. Calculate the absolute position in 2 BPMs in hall A coordinate • 4. Use surveyed BPM hardware position to get relative position , center is BPM's center • 5. Get the relationship between the relative position and ADC value, update the configuration file in database. • 2. Calculate Beam Position in target • 1. Use BdL to get a crop of tracks from the first BPM to target, get the position in 2 BPMs(x1,y1,x2,y2) and target(x,y,theta,phi ), save it to a file as mudifi input format • 2. Use mudifi fit to get the relationship between (x1,y1,x2,y2) and (x,y,theta,phi), save the fit data to a configuration file and copy it to database • 3. Use this fit data(it is a fit function) to calculate the target beam position by using 2 BPMs information • 4. Note everytime changes the BPM's hardware position, target's hardware position, target field, chicane setting, this fit procedure is needed to do again
Rastered beam reconstruction 1.THaRasteredBeam’s behaviour Just using raster’s magnet current information to reconstruction Assuming beam center is always in target center and stable 2.Method used in GEn X=<X>+m*(I-<I>) <X> from 1000 events BPM information m from calibration of raster’s magnet current ADC value with beam size 3.Method used in E93050 Rephase BPM information real position: B_im is measured beam position from BPM, B_a is bean amplitude R_im is measured value of raster,R_a is raster amplitude Useless for us
Magnet From fast raster to target: Fast Raster Magnet Slow Raster Magnet Moller Magnet FZ1 Magnet FZ2 Magnet Yves said there will have no x y interaction For these Magnets, and the linearity problem can be ignored Every Magnet will have about 0.1% uncertainty
To check the x y interaction.. BPM Spec: 10~30nA beam, 2.6kHz bandwidth->resolution:300um 1uA beam,2.6MHz bandwith->resolution:300um It is easy to change bandwith by using BPM control board UI (increase bandwith will reduce position resolution) We can use BPM to check if there have x y interaction and the linearity Procedure: 1.Move target to empty 2.Increase beam to 1uA and increase BPM bandwith to 1MHz,also can reduce slow raster’s frequency 3.Turn on slow raster and turn off fast raster 4.Take data Uncertainty=(2*π*2cm)*(100Hz)*(10e-6s)=13um<BPM resolution (if frequency is 100Hz for slow raster) Also we can get the relationship between Slow raster’s Magnet Current and Beam Position in 2 BPMs
If there is no x y interaction and ignore linearity: X=<X>+m_sr*(I_sr-<I_sr>)+m_fr*(I_fr-<I_fr>) <X> is average beam position in 1000~2000 events gotten from BPM <I_sr> and <I_fr> is average raster current ADC value in 1000~2000 events m_sr and m_fr is calibration constant from raster current ADC value with beam size If there is no x y interaction and has nonlinearity: X=<X>+X(I_sr)+X(I_fr) X(I_sr) is the position offset from slow raster current, can be gotten from the method in last slide X(I_fr), because fast raster’s frequency is high, we can not simply get it from that method, but we can take the comparation between fastraster and slow raster and use the same relationship as slow raster.(equivalent value for slow raster’s current that can cause the same size for fast raster got) If there has x y interaction...