Download

1 / 15
160 likes | 275 Views
Design Via Frequency Response. Proportinal- Og Lag- Regulatorer Reg1_slide1 Created 29.09.02 Revised 31.10.05 J.Nybo. Introduktion- Chap. 11.1. Design er baseret på Kaskadekompensation og åbensløjfe Frekvenskarakteristikker (Bode Plots)

E N D
Design Via Frequency Response Proportinal- Og Lag- Regulatorer Reg1_slide1 Created 29.09.02 Revised 31.10.05 J.Nybo
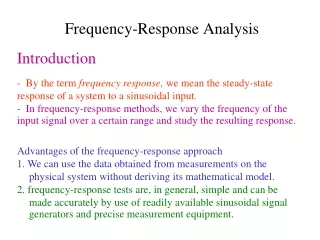
Introduktion- Chap. 11.1 • Design er baseret på Kaskadekompensation og åbensløjfe Frekvenskarakteristikker (Bode Plots) • Dynamiske egenskaber (transient-response) for lukketsløjfen bestemmes af åbensløjfens:Fasemargin -> oversvingBåndbredde -> risetime, settlingtime og peaktime • Statiske egenskaber(steady-state) for lukketsløjfen bestemmes af åbensløjfens forstærkningen ved lave frekvenser. • Vi vil normalt antage at åbensløjfesytemet kan ækvivaleres med et 2.ordenssystem. • Vi vil udvikle dimensioneringsprocedurer for regulatorer der kan forbedre både statiske og dynamiske egenskaber:-proportional-regulatorer (P)-Lag-regulatorer (PI)-Lead-regulatorer (PD)-Lead-Lag-regulatorer (PID)
Proportional regulator (Gain adjust)chap. 11.2 • Forbedring af dynamiske egenskaber ved justering af forstærkning. • Stationære egenskaber bestemmes ved at bestemme:KpKvKa
Example 11.1 Problem: For the possition control system in fig 11.2 find the value of preamplifier gain, K, to yield a 9.5% Overshoot in the transient response for a step input 100 G(s) = --------------------- s(s+100)(s+36) Gc(s) = K
OS=9.5% = 0.60 => = 59,2 deg. Af af fasekarakteristikken bestemmes fasemarginsfrekvensen ωφm= 15 rad/sec. Af amplitudekarakteristikken bestemmes k = 55,4dB ~ 592g
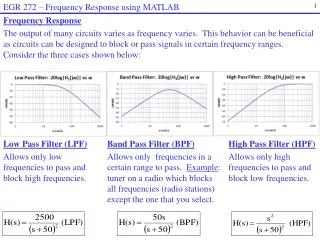
Lag Regulator (Lag-compensation)Chap. 11.3 Formålet med Lag-regulatoren er at forbedre reguleringssyste- mets stationære egensker. Det gøres ved at øge forstærk- ningen ved lave frekvenser. Herved opnås det at den stationære fejl reduceres uden at de dynamiske egenskaber påvirkes synderligt. [Gc(jω)]dB T=10 og α=10 Arg[Gc(jω)]
Dimesioneringsprocedure for Lag-regulatorer (gælder også proportional-regulatoren) -90 -180
Example 11.2 • Given the system in of figure 11.2, use bode diagrams to design a lag compensator to yield a tenfold improvement in steady state error over the gain compensated system while keeping the percent overshoot at 9.5% • I eksempel 11.1 fandt vi for 9,5% oversving: 100 G(s) = --------------------- ; Gc(s) = K = 592; og s(s+100)(s+36)ωφm= 15 rad/sec. ;
En 10 ganges forbedring af stationære egenskaber betyder at α = 10 Vi vælger 10 gange under ωφm= 15 rad/sec. => 1/T = 1.5 rad/sec.
Bemærkninger til Lag design • Det ses at oversvinget bliver større end forventet. Det skyldes to faktorer:1: at der ikke ved dimesioneringen af Proportionalregulatoren er taget hensyn til det bidrag til fasedrejning der fås fra lag- regulatoren. Dette bidrag reducerer fasemargin med max 5.7grader når 1/T ligger 10 gange under fasemarginsfrekvensen og med 2.9 grader 1/T ligger 20 gange under fasemarginsfrekvensen.2: det samlede system er af 4. orden. Forudsætningerne for sammenhængen mellem fasemargin og oversving gælder kun for et rent 2. Ordens system. • Som det fremgår er der ikke den store forskel på oversvinget om 1/T ligger 10 eller 20 gange under fasemarginsfrekvensen. Heraf kan det konkludres, at det væsentliste årsag til det større oversving skyldes, at systemet er af højere orden.Af stepresponsen fremgår det ligeledes at indsvingningtiden stiger når 1/T ligger lang fra fasemarginsfrekvensen hvilket kan forklares med at forstærkningen ved ”lave” frekvenser (10 gange under fasemarginsfrekvensen) er reduceret. • Det gennemregnede eksempel 11.2 i bogen giver et oversving på 10%. Dette oversving kommer rættere på de ønskede 9.5%, hvilket skyldes at der overkompenseres ved at øge fasemargin med 10%.PS! Bemærk at bogens dimensineringsprocedure i princippet er identisk med den her anvendte når vi kombinerer proceduren for proportinalregulatoren (og senere lead regulatoren) med proceduren for lag regulatoren. Forskellen ligger i at bogen korrigerer G(s) med faktoren α i stedet for at indbygge forstærkningen i Gc(s). Denne fremgangsmåde virker noget omvendt. • Bemærk at den anvendte procedure forudsætter at evt. fasemarginskorrektioner laves inden lag- regulatoren dimensioneres (proportionalregulatoren dimensioneres inden lag-regulatoren)
Opgaver • Skill-assesment Exercise 11.1.Proportional-regulator. • Skill-assesment Exercise 11.2.Lag-regulator (uden korrektion)