Download
1 / 11
110 likes | 315 Views
Distributed Tracking Using Kalman Filtering. By: Aaron Dyreson (aaron.dyreson@mavs.uta.edu) Supervising Professor: Dr. Ioannis Schizas (schizas@uta.edu). Introduction. Topic of Research: The performance of different distributed Kalman Filtering Algorithms in wireless sensor networks

E N D
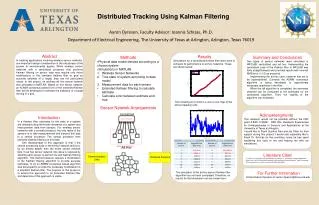
Distributed Tracking Using Kalman Filtering By: Aaron Dyreson (aaron.dyreson@mavs.uta.edu) Supervising Professor: Dr. IoannisSchizas (schizas@uta.edu)
Introduction • Topic of Research: The performance of different distributed Kalman Filtering Algorithms in wireless sensor networks • What is Kalman Filtering? • Brief History • Applications • Wireless Sensor Networks • Centralized • Ad Hoc
Extended Kalman Filtering (1/2) • Data Model Assumptions: • A: State transition matrix • h: Observation function • Noise vectors wk and vk • Physical Interpretation • wk and vkare zero mean with covariance matrices Q and R respectively
ExtendedKalman Filtering (2/2) • Algorithm • Prediction Update: • Linearization • Kalman Gain Calculation: • Measurement Update:
Wireless Sensor Networks • Topologies to be simulated in research • Centralized Ad Hoc
Methodology/Procedure • Choose system to study • Derive physical data model for system • Simulations in MATLAB: • Wireless sensor network (WSN) with N sensors • Trajectory of object according constant velocity model • Range and bearing measurements for each sensor • Perform extended Kalman filtering in MATLAB to obtain estimates for state of system • Calculate localization error between estimate and true
Results (1/4) • Simulations completed so far: • Centralized Extended Kalman Filtering with range and bearing measurments • Centralized Extended Kalman filtering with range measurements
Results (2/4) • Example plots for range and bearing Kalman Filter
Conclusion • Still to be researched: • Simulation of Ad Hoc topologies • Algorithms associated with Ad Hoc topologies • More data collection and analysis for centralized distributed Kalman filtering. • Any questions?