Download
1 / 6
60 likes | 202 Views
Ender A Balancing Biped Robot. Date: 01/28/10 Name: Sean Frucht TAs: Mike Pridgen Thomas Vermeer Instructors : Dr. A. Antonio Arroy Dr. Eric M. Schwartz. Agenda. BackgroundProblem Proposal Design Questions. BackgroundProblem. Small Scale 2002 – Robo -One Begins

E N D
EnderA Balancing Biped Robot Date: 01/28/10 Name: Sean Frucht TAs: Mike Pridgen Thomas Vermeer Instructors: Dr. A. Antonio Arroy Dr. Eric M. Schwartz
Agenda Background\Problem Proposal Design Questions
Background\Problem Small Scale 2002 – Robo-One Begins 2004 – Khr-1 Released Large Scale Research Based 1940 – First attempts began 1989-2010 – Interest and Development Grows Immensely
Proposal Balancing Walking Collision Avoidance Standing up
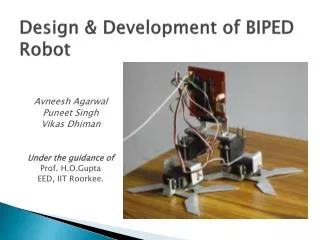
Design • 6 Degrees of Freedom • HSR-5990TG Servos(417 oz-in Robotic) • Lyxnmotion SES Brackets
Questions? References http://www.lynxmotion.com/images/data/hsr5990tg.pdf http://pages.cpsc.ucalgary.ca/~jaeger/visualMedia/robotHistory.html History http://en.wikipedia.org/wiki/Zero_Moment_Point