Download
1 / 28
310 likes | 557 Views
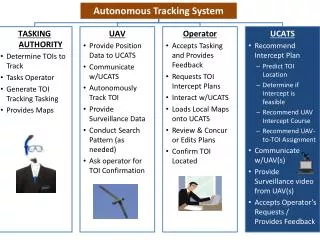
Direction-Finding Sonar System for Autonomous Submarine. Estee Amana, Nicole Rennalls, Mitcham Costley, Frederick Ealick ECE Department Georgia Institute of Technology ECE4007 L01 October 22, 2008. Project Overview. Submarine. Autonomous Underwater Vehicle.

E N D
Direction-Finding Sonar System for Autonomous Submarine Estee Amana, Nicole Rennalls, Mitcham Costley, Frederick Ealick ECE Department Georgia Institute of Technology ECE4007 L01 October 22, 2008
Navy Competition 2009 Bridge Rooftop Rooftop Practice Side Competition Side Launch Platform
Mission To build sonar system under $400 to complete “Rooftop” task for competition
Detect Ping Frequency: 20-30kHz 2s 1.3ms
Determine Direction Direction of Motion 60° Top View
Communication RS-232 Sonar Group MRG Group
Time Delay Receiver #2 t2 t1< t2 t1 Receiver #1
Sonar System Block Diagram Variable Gain Amplifier Linux SBC Hydrophones ADC RS232 Pinger Measure Time Delay
Hydrophones Linux SBC Variable Gain Amplifier Hydrophones ADC RS232 Pinger Measure Time Delay
Hydrophone Construction Coaxial Cable Metal Casing Transducer Metallic Membrane Cost: $150
Amplifiers Variable Gain Amplifier Linux SBC Hydrophones ADC RS232 Pinger Measure Time Delay
Filtering Amplifier Design and Testing Cost: $50 • Four stage amplifier circuit • Band pass filter to remove noise V μV
Amplification Incoming Hydrophone Signal Outgoing Amplified Signal
Linux SBC Linux SBC Variable Gain Amplifier Hydrophones ADC RS232 Pinger Measure Time Delay
Sonar System Controller Receives 1000 samples/channel Averages 10 highest & 10 lowest samples Determines time delay Cost: $150
Cross-correlation V V2 Time (sec)
Auto-calibration Pinger Hydrophone Direction of motion Submarine Goal: Eliminate error from submarine design changes, trace lengths, etc.
Demonstration Laptop GT Pool Serial Cable Waterproof PVC Pipe Pinger Hydrophones Electronics
Current Status Construct and test amplifier prototype Implement existing embedded code Build hydrophones Construct amplifier on solder board Test automatic gain control
Project Schedule Test amplifier with pinger Complete hydrophones Mount hydrophones Integrate system Oct Nov Dec Design PCB Demonstration Assemble circuit solder board Control gain Competition Date: June 2009