Download

1 / 25
250 likes | 345 Views
Explore how small angle rotation & shift can enhance EUV defect mitigation processes. Learn about layout relocation and how to detect the best relocation positions efficiently.

E N D
Layout Small-Angle Rotation and Shift for EUV Defect Mitigation Hongbo Zhang1, Yuelin Du2, Martin D.F. Wong2, Yunfei Deng3, Pawitter Mangat3 1Synopsys Inc., Hillsboro, OR 2Dept. of ECE, University of Illinois at Urbana-Champaign 3GlobalFoundries Inc., Sunnyvale, CA
Outline • Introduction of EUV process • Previous works on defect mitigation • Shift-only approaches analysis. • Motivation to introduce rotation • Our method and analysis • Experimental results • Conclusions ICCAD'12
Introduction of EUV • Every lithographer has his own EUV dream, since over 15 years ago: • Sweet part: 193nm vs 13.5nm • Nightmare: cost, defect, throughput, process control… ASML NXE 3100: http://www.mysemicondaily.com/blog/2010/7/6/asmls-pre-production-euv-tool-achieves-first-light.html http://www.dcsc.tudelft.nl/~mverhaegen/n4ci/pid.htm ICCAD'12
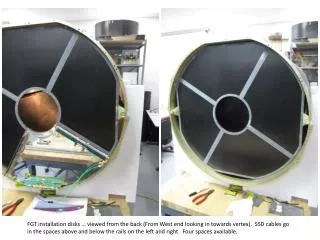
EUV Masks Ideal Mask • EUV mask is a mirror with Multi-layer structure. • In reality, EUV blanks are defective: • Buried defects • Particles • EUV defects could cost serious printing problem. Real Mask C. H. Clifford et. al. SPIE 2010, 763623 ICCAD'12
EUV Defect Mitigation Process • In order to mitigate defects, we need… • Inspection tools • Behavior model • Mitigation method • Among all defect mitigation approaches, layout relocation is one of most cost-effective ways to mitigate defects. ICCAD'12
Validation of Layout Relocation– Fiducial Mark • Fiducial mark creates coordinates for defect map and layout. • During mask preparation, the layout could have small angle rotation and shift for coordinate pairing. http://ieuvi.org/TWG/Mask/2009/MTG022209/Summary_of_SPIE_FIDUCIAL_MARK_Sematech.pdf ICCAD'12
Previous Work on Pattern Relocation • Industrial Initiations [J. Burns, BACUS 2010] • Call this “defect avoidance” and demonstrate an initial work • Allow shift in X and Y directions and 90 degree rotation • Very slow. • 64x146 minute CPU time. • Could only answer yes/no ICCAD'12
Previous Work on Pattern Relocation, cont’ • Improved work [H. Zhang, ASP-DAC’12] • Largely speed up the process (~100x). • Can find the least defective location (non-zero). • Could embed an effective defect model. ICCAD'12
However, Something is Still Missing… • Missing the possibility of small angle rotation of layout. • Low success ratio: • Highly depends on defect size and # • Need large amount of defect removal process • Need efficient algorithm to the following layout-blank pairing process ICCAD'12
Importance of Small Angle Rotation • Reticle holder can rotate a tiny small angle for alignment adjustment. • Small angle rotation helps explore the 3rd exploration dimension. • Previous work becomes a special case when θ=0. • Important to increase success rate of layout-blank pairing. ICCAD'12
Input/Output of Our Algorithm • Input: • Layout/Die • Feature location • Boundary sensitivity • Blank/Mask • Defect info (height, FWHM) and distribution • Freedom (X,Y,θmax) • Output: • Best Relocation position (∆X, ∆Y, θ) to cover or avoid the most defects. ICCAD'12
Relocation Bound • Layout relocation are always bounded • Rotation: ±θmax • Shift: ±Fmax • The rotation bound and shift bound are correlated with each other, which can be linearly described as: ICCAD'12
Solution Space Analysis • The whole solution space is an octahedron in ∆X-∆Y-θspace. • In this octahedron: • The cross-section on the plane ∆X=0 and ∆Y=0 is the θmax-Fmaxtriangle (dashed regions). • The cross-section on the plane θ is a square. • The problem is equal to detecting the best point in the octahedron for layout relocation. ICCAD'12
Definition of Prohibited Rectangle A defect with radius r • Prohibited Rectangle: • The prohibited region of the center of a defect for one boundary • Target of relocation: • Avoid any defect center to be shifted into its own Prohibited Rectangles ICCAD'12
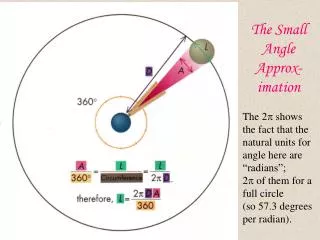
Definition of Prohibited Relocation Cube • Prohibited relocation movement (∆X, ∆Y, θ) for each prohibited rectangle • Small angle approximation • Prohibited relocation cube (PRC) in ∆X-∆Y-θ space ICCAD'12
Detect the Best Relocation Position • Detect the best relocation Position ↔ Find the minimum overlapping PRC • Any non-overlapping region works! • Sweeping line algorithm: • Early stops when 0 is detected For each θ: Scan each rectangle overlapping regions: ICCAD'12
Efficiency of the Approach • Impact region is very limited • Fmax is usually ±200um • Impact region is much smaller than a full chip size (4X reduction factor) • Only prohibited rectangles in the impact region need be considered ICCAD'12
Efficiency of the Approach, cont’ • Defect movable region is very limited: • Each defect’s movable region is much smaller than the overall layout • Usually a few hundreds micron by a few hundreds micron • Layout can be chopped based on the defect maps, and only those with movable region need be read in. Original Layout Piece Piece Piece Piece … Useful Defect Mitigation ICCAD'12
Linearity of the Algorithm • The default Sweeping Line Algorithm has time complexity O(nlog(n)); n is the rectangle # • O(nlog(n)) is from the sort of the rectangles’ vertices. • In our problem, the prohibited rectangle # n is comparable to the grid number in a sweeping plane. • Directly use the coordinate grid in the solution space as the sweeping grid. • The runtime can be reduced to O(F2maxNθ). • Linear to the solution space. • Much smaller than the brute-force approach: O(n*F2maxNθ). ICCAD'12
Modification for Alignment Error • We are usually seeing an alignment error or defect location error (±dx’, ±dy’, ±dθ’) during the fiducial mark alignment process. • The prohibited relocation cube can be modified to be: • The prohibited relocation cube overlapping method is still valid. ICCAD'12
Modification for Cover-Only Case • Sometimes, it is required that defects should only be covered by the absorbers. • Modification on the solution: • Change prohibited rectangle to allowable rectangles. • Change target to find the maximum overlapping allowable relocation cube ICCAD'12
Experimental Results • Experiment setup: • One full size test chip (17.25MB in oasis, ~9GB in GDS) • Randomly generated defect maps with random size 0~250nm radius • Intel Xeon 2.40GHz CPU • 52GB memory • Fmax=±200um • Nθ=300 ICCAD'12
Experimental Results, cont’ • Rotation can largely benefit the defect relocation approach • Need support of reticle holder ICCAD'12
Conclusions • This is the first ever paper for the algorithm to relocate layout for EUV defect mitigation with small angle rotation. • We largely increase the success rate. • The runtime of the algorithm is linear to the size of solution space. • The algorithm can be expanded for more complex requirements: • Cover-only requirement • Fiducial mark misalignment. • The result demonstrates a promising future for EUV defect mitigation with layout relocation approach. ICCAD'12
Thanks ICCAD'12