Download
1 / 18
180 likes | 202 Views
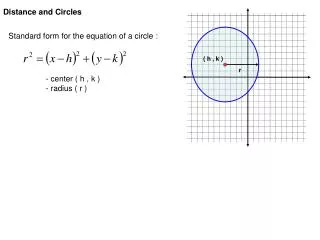
Osculating Circles and Trajectories. Just Kidding. Osculating Circles and Trajectories. M. q. r. m. v. Mechanical Energy. M. F. m. v. Circular Orbit. How do we get the mass, M, of the gravitating object? Apply Newton’s Second Law to the mass, m << M. C. r.

E N D
Osculating Circles and Trajectories Just Kidding
Osculating Circles and Trajectories M q r m v Mechanical Energy
M F m v Circular Orbit How do we get the mass, M, of the gravitating object? Apply Newton’s Second Law to the mass, m<<M C r
General Orbits, Conic Sections parabola, e=1 hyperbola, e>1 ellipse, 0<e<1 r circle, e=0 q In polar coordinates
General Orbits, Conic Sections, polar unit vector notation In terms of unit vector notation we have: Differentiating the position vector with respect to time we have the velocity: or, and, In polar coordinates so,
General Orbits, Conic Sections, polar unit vector notation Differentiating the velocity vector with respect to time we have the acceleration: or, or, or, In polar coordinates so,
General Orbits, Conic Sections, polar unit vector notation Recall that And note that Then we get for the acceleration, In polar coordinates Combining terms in unit vectors,
ds db r General Orbits, Conic Sections, normal and tangential unit vector notation In polar coordinates In terms of unit vector notation we have: Differentiating the velocity vector with respect to time we have the acceleration: Note that or, and, C so, and so,
General Orbits, Conic Sections We now have the acceleration in normal and tangential unit vector notation In polar coordinates Compare this with the acceleration in polar coordinate unit vector notation
General Orbits, Conic Sections, continued parabola, e=1 hyperbola, e>1 When q= 0, we have ellipse, 0<e<1 circle, e=0 v
General Orbits, Conic Sections, continued part 2 At the minimum distance from the massive body the acceleration is purely radial or normal depending upon your point of view. When q= 0, we have Let’s write the acceleration at q = 0 for each basis. becomes v and becomes
When q= 0, we have v General Orbits, Conic Sections, continued part 3 In the r,qbasis we have: In the t,nbasis we have: we get Because
The Osculating Circle at closest approach We have and because C we get v Let’s obtain
Polar coordinates Let’s re-write this as And take two successive derivatives with respect to time to obtain Now let q = 0 to get which now gives or
The Osculating Circle at closest approach We now know so C and v or
The Osculating Circle at closest approach continued Compare this with the polar form of a conic section Clearly C The semi-latus rectum for conic sections is nothing more than the radius of the osculating circle at the distance of closest approach. v
Polar Coordinates The equation for a conic section could now be written as Apply Newton’s second law to m M m C Solving for M we get v or
General Orbits, Conic Sections parabola, e=1 hyperbola, e>1 When q= 0, we have ellipse, 0<e<1 circle, e=0 M Ch Cp Ce Cc v