Download
1 / 1
10 likes | 162 Views
Orienting Raw Point Sets by Global Contraction and Visibility Voting School of Mathematical Sciences, Dalian University of Technology, Dalian, China School of Computer Engineering, Nanyang Technological University, Singapore.

E N D
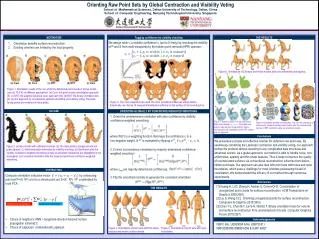
Orienting Raw Point Sets by Global Contraction and Visibility Voting School of Mathematical Sciences, Dalian University of Technology, Dalian, China School of Computer Engineering, Nanyang Technological University, Singapore Cons ORT BOT Ours (a) Input (b) Cons (c) ORT (d) BOT (e) Ours MOTIVATION Tagging confidence by visibility checking THE RESULTS Orientation benefits surface reconstruction. Existing orienters are limited by the local property. We assign each via visibility confidence ci (set to 0 firstly) by checking the visibility of P and S from multi-viewpoints by the hidden point removal (HPR) operator: Cons ORT Ours Cons ORT BOT Ours Figure 6. Orientations of Dinosaur and Horse models with non-uniformities and sparsity. Figure 1. Orientation results of the non-uniformly distributed point clouds of Venus model (see (a) 72.5 K) via different approaches. (b) Cons: the point clouds consolidation approach [9]. (c) ORT: the adaptive spherical cover approach [14]. (d) BOT: the binary orientation tree [4]. (e) Our approach by constrained Laplacian smoothing and visibility voting. The back-facing points are rendered in black splats. 1. Orient the undetermined orientation with zero-confidence by visibility confidence-weighted smoothing , where W(C) is a weighting function that maps the confidence cito a non-negative weight. is estimated by flipping if. 2. Correct inconsistence orientation by majority-determined confidence-weighted smoothing , wherecmajare majority-determined confidences, 3. Flip the smoothed normals to generate the consistent orientation Figure 3. The more viewpoints are used, the more qualified confidences will we obtain. Empirically, we choose 14 viewpoints distributed uniformly on the surface of the bounding box. OUTLINE ORIENTING GLOBALLY BY CONFIDENCE-WEIGHTED SMOOTHING Figure 7. Robust to noise. The top row shows three noisy models (0.5%, 1% and 3%). The middle and bottom rows are the corresponding Poisson reconstruction via orientation by the ORT orienterand our approach. Figure 8. Orientation benefits reconstruction. Top row: the orientation of various point clouds by our approach; Bottom row: the reconstructed meshes of BRF method by using our orientation results. Conclusions We presented a simple and effective orienter for defective raw point sets. By seamlessly combining the Laplacian contraction and visibility voting, our approach tackles the problem without resorting to any complicated data structures and advanced solvers. As a global approach, our method is able to handle noise, non-uniformities, sparsity and thin sharp features. Thus it helps to improve the quality of reconstructed surfaces via conventional reconstruction schemes from defect-ridden point sets. Our approach can also deal with point sets with holes and open boundaries, which pose a challenge for most orienterspossessing the aid of voxelization. We demonstrated the efficacy of our method through numerous experiments. Figure 2. (a) Input model with estimated normals. (b) The input points (orange) and shrunk points (green). (c) Initial orientation estimation by visibility checking. (d) Orientation after the visibility confidence weighted smoothing (locally inconsistent orientations are highlighted in red rectangles). (e) Consistent orientation after the majority-determined confidence weighted smoothing. CONTRACTING • Compute orientation indication vector by contracting point set P=(X,Nin) a bit to a shrunk point set S=(X’, Nin). Nin is estimated by local PCA. • Choice of neighbors: KNN + tangential-direction-favored normal propagation scheme[1] • Choice of Laplacian: combinational Laplacian References [1] Huang H, Li D, Zhang H, Ascher U, Cohen-Or D. Consolidation of unorganized point clouds for surface reconstruction. ACM Transactions on Graphics 2009;28(5). [2] Liu S, Wang CCL. Orienting unorganized points for surface reconstruction. Computers & Graphics 2010;34(3). [3] Chen Y-L, Chen B-Y, Lai S-H, Nishita T. Binary orientation trees for volume and surface reconstruction from unoriented point clouds. Computer Graphics Forum 2010;29(7). Attraction constraint Contraction constraint THE RESULTS b d c Acknowledgements NSFC (No. U0935004 & No. 60873181) NRF2008IDM-IDM004-006 & AcRF69/07 Figure 5. Orientations of point sets with open boundaries. Figure 4. Orientations of point sets with thin sharp features and nearby surface sheets.