Download
1 / 21
210 likes | 391 Views
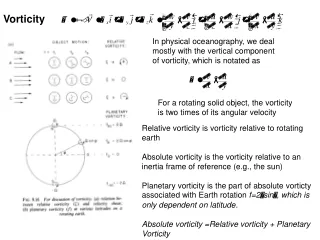
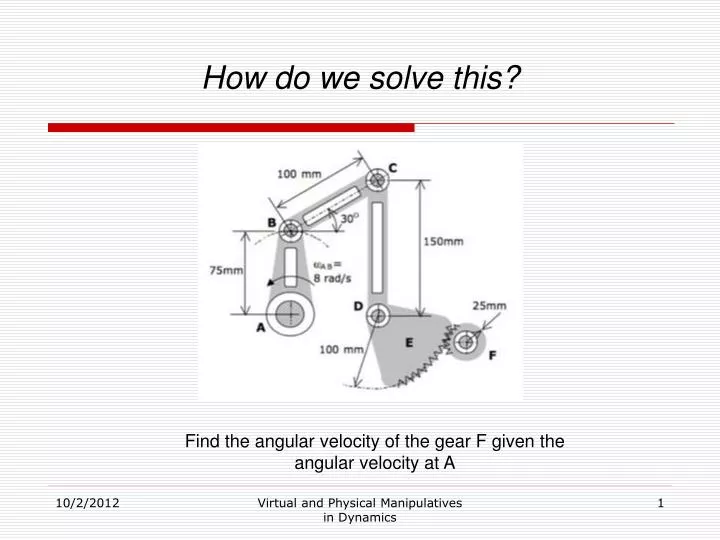
How do we solve this?. Find the angular velocity of the gear F given the angular velocity at A. The Effect of Virtual and Physical Manipulatives on Students’ Abilities to Learn Dynamics in an Undergraduate Mechanical Engineering Program. A Dissertation Proposal 10/2/2012 Edward Pan

E N D
How do we solve this? Find the angular velocity of the gear F given the angular velocity at A Virtual and Physical Manipulatives in Dynamics
The Effect of Virtual and Physical Manipulatives on Students’ Abilities to Learn Dynamics in an Undergraduate Mechanical Engineering Program A Dissertation Proposal 10/2/2012 Edward Pan University of Virginia
Agenda • Introduction • The Problem • Research Questions • Significance • Theoretical Framework • Visualizations & Manipulatives • Dynamics Education • Context & Participants • Study Design • Instruments & Data • Analysis • Expected Outcomes • Budget, Equipment, Timeline Virtual and Physical Manipulatives in Dynamics
Introduction • STEM education a national focus • Engineering education must adapt • Technology for authentic practice • 3D printing • CAD • Need to help nontraditional students • Visualization a key skill Virtual and Physical Manipulatives in Dynamics
The Problem • Dynamics • Foundational course in mechanical engineering • Study of accelerated motion • Particle kinematics • Particle kinetics • Rigid body kinematics • Lecture and problem solving with static diagrams • Students have difficulty solving problems • Difficulty visualizing the problem may be responsible Virtual and Physical Manipulatives in Dynamics
Research Questions • How does student performance compare for students with instruction supplemented with virtual manipulatives, instruction supplemented with physical manipulatives, and traditional methods of instruction? • How do students use static diagrams, physical manipulatives, and virtual manipulatives when learning rigid body kinematics? • What kinds of mental models of mechanical systems do students develop using static diagrams, physical manipulatives, and virtual manipulatives? • What do students think about static diagrams, physical manipulatives, and virtual manipulatives as learning aids? Virtual and Physical Manipulatives in Dynamics
Significance • Knowledge of how students learn with physical and virtual manipulatives • How students learn dynamics • Engineering education • Instructional technology • Higher Education • Education as a whole Virtual and Physical Manipulatives in Dynamics
Theoretical Framework • How People Learn • Embodied Cognition • Cognitive Load Theory • Mental Models • Phenomenological Primitives • Mappings • Analogical Thinking • Mechanistic Mental Models Virtual and Physical Manipulatives in Dynamics
Visualizations & Manipulatives • Visualizations • Tend to support lower performance and lower spatial ability students • Deceptive Clarity & Illusion of Explanatory Depth • Physical Manipulatives • Virtual Manipulatives • Mixed results Virtual and Physical Manipulatives in Dynamics
Dynamics Education • Supplementary Computer-Based Instruction • Computer Aided Design • Virtual Environments • Hands-On Activities • Restructuring Pedagogical Approaches Virtual and Physical Manipulatives in Dynamics
Context & Participants • MAE 2320 (Dynamics) Spring 2013 semester at UVA • 150-170 students • Lecture: 2x 1:15 • Lab: 1x 2:00 Virtual and Physical Manipulatives in Dynamics
Study Design • Quasi-experimental w/ stratified sampling • Treatment groups: • Traditional: lecture + static diagrams • Physical: lecture + static diagrams + physical manipulatives • Virtual: lecture + static diagrams + virtual manipulatives Virtual and Physical Manipulatives in Dynamics
Study Design: Procedure • Pretest • Treatment: 4x 20m breakout sessions to solve 1 multipart problem ea. • Absolute • Relative velocity • Instant centers & relative acceleration • Rotating axes • Posttest & Questionnaire Virtual and Physical Manipulatives in Dynamics
Instruments & Data • Pre/Posttest • DCI • PSVT • Questionnaire • Video recordings Virtual and Physical Manipulatives in Dynamics
Analysis Virtual and Physical Manipulatives in Dynamics
Expected Outcomes • No difference • Virtual and physical benefit low performers, no effect on high performers • Virtual and physical hurt low performers, no effect on high performers Virtual and Physical Manipulatives in Dynamics
Budget Virtual and Physical Manipulatives in Dynamics
Other Equipment Virtual and Physical Manipulatives in Dynamics
Timeline Virtual and Physical Manipulatives in Dynamics
Takeaway Points • Dynamics is difficult, visualization may be why • Physical and virtual manipulatives may help students visualize mechanical systems • Most likely to benefit students with low spatial abilities or low performance, if at all • May actually have no effect or even harm students’ abilities to visualize • This study is worthy of investigation Virtual and Physical Manipulatives in Dynamics
Questions? Virtual and Physical Manipulatives in Dynamics