Download
1 / 23
230 likes | 321 Views
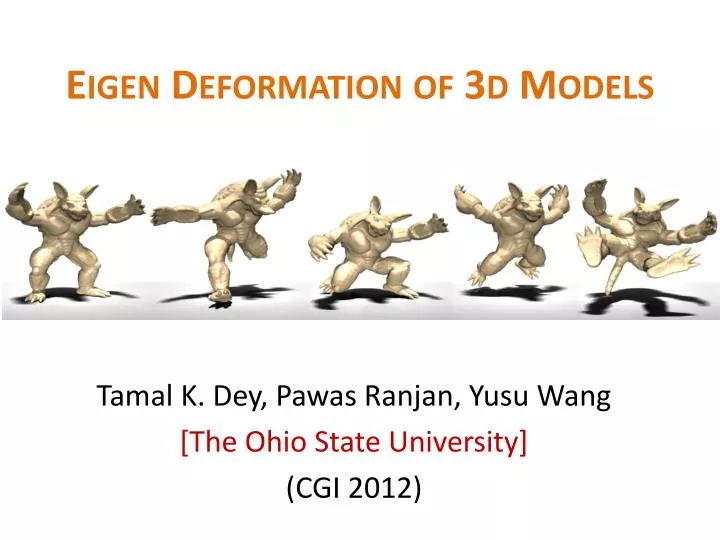
E IGEN D EFORMATION OF 3 D M ODELS. Tamal K. Dey , Pawas Ranjan , Yusu Wang [The Ohio State University] (CGI 2012). Problem. Perform deformations without asking the user for extra structures (like cages, skeletons etc ). Previous Work. Skeleton based [YBS03], [DQ04], [BP07],...

E N D
EIGEN DEFORMATIONOF 3D MODELS Tamal K. Dey, PawasRanjan, Yusu Wang [The Ohio State University] (CGI 2012)
Problem • Perform deformations without asking the user for extra structures (like cages, skeletons etc)
Previous Work • Skeleton based [YBS03], [DQ04], [BP07],... • Cage based [FKR05], [JMGDS07], [LLC08],... • Constrained vertices and energy minimization [SA07], [YZXSB04], [ZHSLBG05] ,etc.
Cage-less deformation • Skeleton and cage based methods • very fast, but need extra structures • Energy based methods • do not require extra structures, but are usually slow Need to perform fast deformations without asking the user for extra structures like skeletons or cages
The Laplace-Beltrami operator • A popular operator defined for surfaces • Isometry invariant • Robust against noise and sampling • Changes smoothly with changes in shape • Its eigenvectors form an orthonormal basis for functions defined on the surface
Eigen-skeleton • Treat x, y and z coordinates as functions • Reconstruct them using the eigenvectors, ignoring high frequencies
Eigen-skeleton for deformation • User specifies a shape along with: • A region on the shape • Deformation desired on that region • We: • Create the eigen-skeleton • Apply the deformation to the entire region • Smooth out the skeleton • Add details to get the deformed shape
Choice of number of eigenvectors • Need to be able to capture the feature to be deformed • Use the size of region of interest to choose the number of eigenvectors to use • Smaller features need more eigenvectors
Skeleton energy • Let <ϕ1, ϕ2, ... ϕm> be the top m eigenvectors • We wish to find new weights for the deformed shape
Skeleton energy • Taking partial derivatives and re-arranging the terms, we get the following linear system
Skeleton energy • Solving for the unknown weights Ai, we get a smooth representation of the deformed skeleton
Recovering Shape Details • Using few eigenvectors causes loss of details • Once smooth deformed skeleton is obtained, these details need to be added back • Use the one-to-one correspondence between the shape and skeleton to recover the details
Conclusion • Fast deformations using implicit skeleton • No need for user to provide extra structures • Software coming very soon! • Result not necessarily free of self-intersections • Computing the eigenvectors of the Laplace operator can be time-consuming