Download

1 / 25
260 likes | 384 Views
Parallel Compensator for Control of Multivariable Systems with Difficult Plants. Ryszard Gessing Silesian University of Technology Gliwice, Poland. Outline of Presentation. Introduction Parallel Compensator (PC) for SISO Plants Parallel Compensator for MIMO Plants

E N D
Parallel Compensator for Control of Multivariable Systems with Difficult Plants Ryszard Gessing Silesian University of Technology Gliwice, Poland
Outline of Presentation • Introduction • Parallel Compensator (PC) for SISO Plants • Parallel Compensator for MIMO Plants • Closed Loop System Description • Design Algorithm • Example • Final Conclusions
Introduction • Smith predictor (compensator), 1958 • Deng, Iwai and Mizumoto 1999 for minimum phase plants • Gessing ACC 2004 for nonminimum phase plants
Outline of Presentation • Introduction • Parallel Compensator (PC) for SISO Plants • Parallel Compensator for MIMO Plants • Closed Loop System Description • Design Algorithm • Example • Final Conclusions
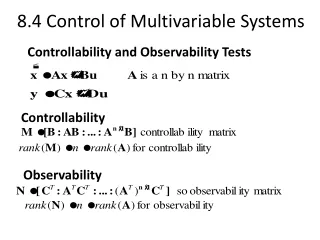
The case of SISO plant is stable Regulator: Układ zamknięty:
Replacement plant: n-the plant order where Characteristic equation of the closed loop system:
Outline of Presentation • Introduction • Parallel Compensator (PC) for SISO Plants • Parallel Compensator for MIMO Plants • Closed Loop System Description • Design Algorithm • Example • Final Conclusions
The multivariable system with PC Decoupling of steady states
Parallel compensator -- replacement plant
The choice of the replacement plant In steady state we have:
Outline of Presentation • Introduction • Parallel Compensator (PC) for SISO Plants • Parallel Compensator for MIMO Plants • Closed Loop System Description • Design Algorithm • Example • Final Conclusions
Regulator for we obtain or
Closed loop (CL) system Multiplying from the left by this matrix we obtain: and finally:
Transfer function of the CL system: Oznaczmy (common denominator of the i-th row of the matrix ) Assuming we obtain: The transients of the i-th output depend on zeros of
Outline of Presentation • Introduction • Parallel Compensator (PC) for SISO Plants • Parallel Compensator for MIMO Plants • Closed Loop System Description • Design Algorithm • Example • Final Conclusions
Design algorithm 1) Assume 2) Choose possibly small so that where
Outline of Presentation • Introduction • Parallel Compensator (PC) for SISO Plants • Parallel Compensator for MIMO Plants • Closed Loop System Description • Design Algorithm • Example • Final Conclusions
Example The plant with 2-inputs and 2-outputs The plant is nonminimum phase since
Decoupling matrix: Decoupled plant:
Results of simulation for For the system is stable and the responses are acceptable
Control saturation dla a dla For the assumed constraints: we obtain: for and for
Outline of Presentation • Introduction • Parallel Compensator (PC) for SISO Plants • Parallel Compensator for MIMO Plants • Closed Loop System Description • Design Algorithm • Example • Final Conclusions
Final conclusions • By using PC the plant is decoupled • The choice of the replacement plant for particular channels is performed independently and is simple as for SISO plant • May be applied for difficult plants • From examples it results that the system is robust, but it is to early to say about that • The plant must be stable • The regulator has a high order