Download
1 / 35
350 likes | 477 Views
Multivariable Control Systems ECSE 6460. Fall 2009 Lecture 15: 23 October 2009. State Space Plant Model. Given a 2 input - 2 output plant:. Coupled Plant. Control Problem. We want the outputs y1 and y2 to track two reference signals r1 and r2 simultaneously.

E N D
Multivariable Control SystemsECSE 6460 Fall 2009 Lecture 15: 23 October 2009
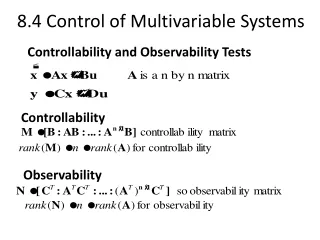
State Space Plant Model • Given a 2 input - 2 output plant:
Control Problem • We want the outputs y1 and y2 to track two reference signals r1 and r2 simultaneously. • Performance criteria for step reference response: • Overshoot less than 5% • Three scenarios for minimum rise time = [30, 3, 0.03] sec
Geometric Input-Output Decoupling
Controller Design + K(s) G + C - + F
Relative Gain Array (RGA) Analysis
Decentralized Control (Diagonal Pairing)
Independent Design • Idea: Design a diagonal controller while disregarding the coupling between the two I/O pairs. + C K(s) -
Decentralized Control (Off-Diagonal Pairing)
Independent Design Not proper!