Download
1 / 21
220 likes | 372 Views
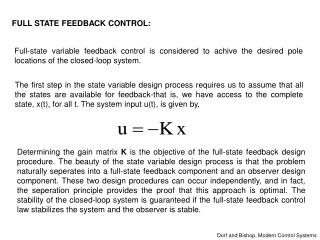
State-Feedback Control of the SpaceHawk Earth-Based Lunar Hopper. Andrew Abraham, May 2013. Background. Researching the dynamics and controls associated with a ‘hopping’ spacecraft trajectory. OBSTACLE. Location A. Location B. Background.

E N D
State-Feedback Control of the SpaceHawk Earth-Based Lunar Hopper Andrew Abraham, May 2013
Background • Researching the dynamics and controls associated with a ‘hopping’ spacecraft trajectory OBSTACLE Location A Location B
Background • 1967- Surveyor 6 has been the only spacecraft to ‘hop’ • - Travelled 8 ft. • Conventional landers are designed to be rovers constrained to the ground • - Disadvantageous for exploring Mars Exploration Rover Surveyor 6
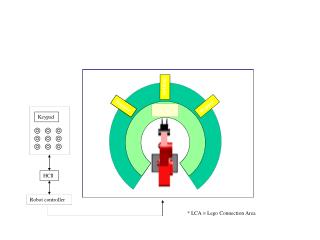
Specifications • 4 ducted fans; each with 10lbs of thrust @ full throttle • Fans Produce ZERO torque @ 75% • Gimbaled in 1 direction • Frame made from aluminum • Easy to construct • Total weight: 32lbs • 26” From end to end
Specifications • Arduino Mega for control computer • MEMS IMU • 4 LiPoly Batteries: 2.25lbs each • ICE 80amp Electronic Speed Controller • Project funded by NASA Arduino Mega 6 DOF Analog IMU 1 of 4 LiPo Batteries
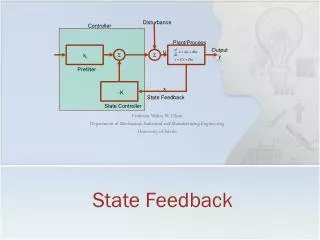
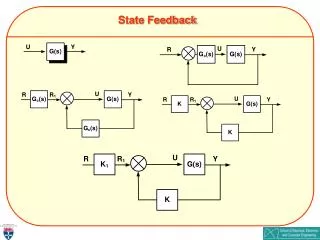
Feedback Linearization(Position) Exact Linearization Control Law Plug Into Equations of Motion Now, linear control laws can be used with r as the virtual input
Exact Feedback Linearization(Angles) Exact Linearization Control Law Plug Into Equations of Motion Now, linear control laws can be used with r as the virtual input
Approximate Feedback Linearization(Angles) Exact Linearization Control Law (highly nonlinear) Near δ = 0 & Approximate Linearization Control Law (linear)
Control Implementation Over-Actuated System Without Following Two Additional Constraints PWM Time
Simulation 3m 10m A B
Definitions Red = Reference Signal, Blue = Exact, Green = Approximate
Acknowledgements Authors: Anthony Dzaba, Andrew Abraham, Evan Mucasey, Terry Hart, and Eugenio Schuster Funding Agencies: NASA PA Space Grant