Download
1 / 17
170 likes | 353 Views
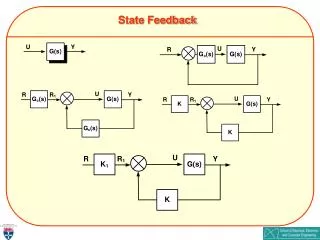
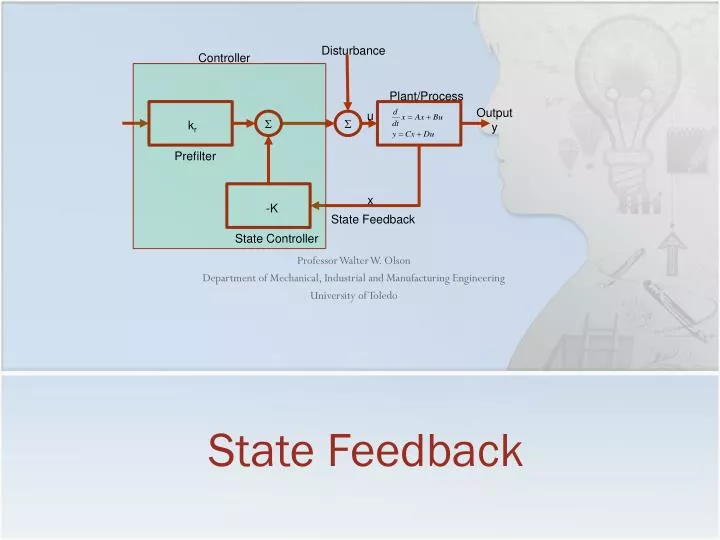
State Feedback. Disturbance. Controller. Plant/Process. Output y. u. S. S. Professor Walter W. Olson Department of Mechanical, Industrial and Manufacturing Engineering University of Toledo. k r. Prefilter. x. -K. State Feedback. State Controller. Outline of Today’s Lecture.

E N D
State Feedback Disturbance Controller Plant/Process Output y u S S Professor Walter W. Olson Department of Mechanical, Industrial and Manufacturing Engineering University of Toledo kr Prefilter x -K State Feedback State Controller
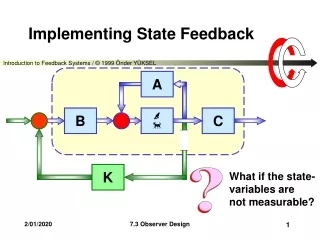
Outline of Today’s Lecture • Review • Reachability • Testing for Reachability • Control System Objective • Design Structure for State Feedback • State Feedback • 2nd Order Response • State Feedback using the Reachable Canonical Form
Reachability • We define reachability (often times called controllability) by the following: • A state in a system is reachable if for any valid states of the system, say, initial state at time t=0, x0 , and a state xf, there exists a solution for t>0 such that x(0) = x0 and x(t)=xf. • There are systems which we can not control • the states are not reachable with our input. • There in designing control systems, it is important to know if the system is controllable. • This is closely linked with the concept of ergodicity of the system in which we ask the question whether or not it is possible to with some measure of our system to measure every possible state of the system.
Reachability • For the system, , all of the states of the system are reachable if and only if Wr is invertible where Wr is given by
Canonical Forms • The word “canonical” means prescribed • In Control Theory there a number transformations that can be made to put a system into a certain canonical form where the structure of the system is readily recognized • One such form is the Controllable or Reachable Canonical form.
Reachable Canonical Form • A system is in the reachable canonical form if it has the structure Such a structure can be represented by blocks as … y S S S S D c1 c2 cn-1 cn … z1 z2 zn zn-1 u S -1 a1 a2 an-1 an … S S S
Control System Objective Given a system with the dynamics and the output Design a linear controller with a single input which is stable at an equilibrium point that we define as
Our Design Structure Disturbance Controller Plant/Process Output y Input r u S S kr Prefilter x -K State Feedback State Controller
Our Design Structure Disturbance Controller u Plant/Process Input r Output y S S kr State Controller Prefilter x -K State Feedback
Restated Control System Objective(Eigenvalue Assignment Problem) Given a system with the dynamics and the output Design a linear controller with a single input which is stable at an equilibrium point that we define aswith a state feedback controller such that Note that kr does not affect stability, is a scalar, and can be chosen as for ye=r
Example • Design a controller that will control the angular position to a given angle, q0
Example • Design a controller that will control the angular position to a given angle, q0
2nd Order Response • As the example showed, the characteristic equation for which the roots are the eigenvalues allow us to design the reachable system dynamics • When we determined the natural frequency and the damping ration by the equationwe actually changed the system modes by changing the eigenvalues of the system through state feedback wn=1 z=0.6 Im(l) Im(l) x wn=4 1 1 z=0.1 x x x wn=2 z=0.4 x z=0 x x wn=1 z=0.6 Re(l) Re(l) z=1 z=1 x x wn -1 -1 z z=0.6 wn=1 x x z=0 x wn=2 x z=0.4 x x -1 -1 z=0.1 x wn=4
State Feedback Design with the Reachable Canonical Equation • Since the reachable canonical form has the coefficients of the characteristic polynomial explicitly stated, it may be used for design purposes:
Example: Inverted Pendulum • Design a controller that will stabilize the Segway forward velocity at a given position, r0
Summary Disturbance • Control System Objective • Design Structure for State Feedback • State Feedback • 2nd Order Response • State Feedback using the Reachable Canonical Form Controller u Plant/Process Input r Output y S S kr State Controller Prefilter x -K State Feedback Next: State Observers