Download
1 / 1
10 likes | 94 Views
Behaviors for Compliant Robots Benjamin Stephens Christopher Atkeson. Methods. Overview. Full Body Compliant Control We are creating controllers that perform model-based full body force control to comply with and recover from disturbances in a variety of contexts[1]. Disturbance Estimation

E N D
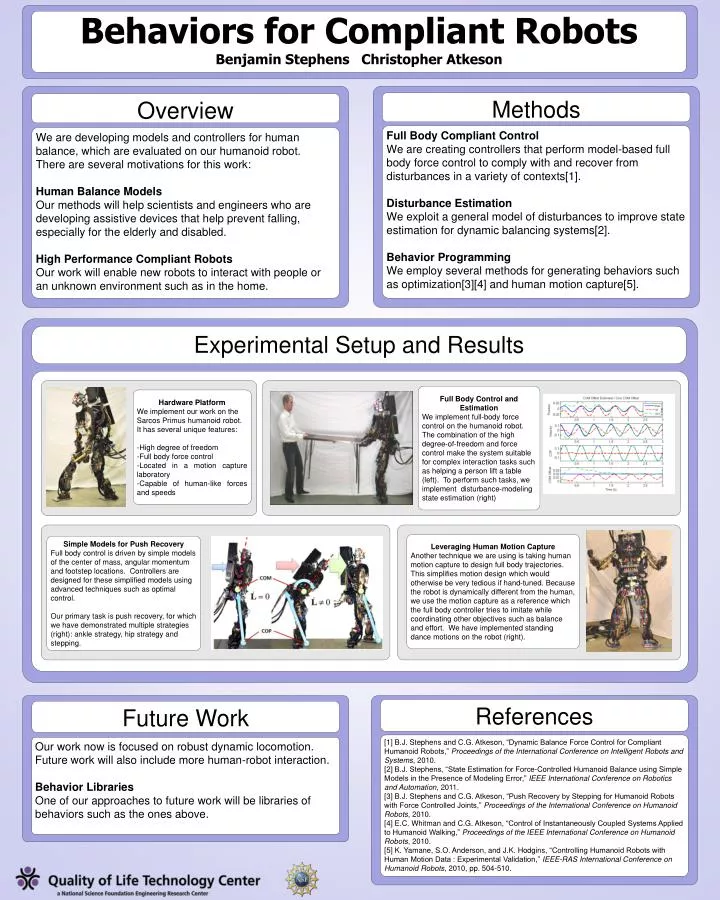
Behaviors for Compliant Robots Benjamin Stephens Christopher Atkeson Methods Overview • Full Body Compliant Control • We are creating controllers that perform model-based full body force control to comply with and recover from disturbances in a variety of contexts[1]. • Disturbance Estimation • We exploit a general model of disturbances to improve state estimation for dynamic balancing systems[2]. • Behavior Programming • We employ several methods for generating behaviors such as optimization[3][4] and human motion capture[5]. We are developing models and controllers for human balance, which are evaluated on our humanoid robot. There are several motivations for this work: Human Balance Models Our methods will help scientists and engineers who are developing assistive devices that help prevent falling, especially for the elderly and disabled. High Performance Compliant Robots Our work will enable new robots to interact with people or an unknown environment such as in the home. References Future Work [1] B.J. Stephens and C.G. Atkeson, “Dynamic Balance Force Control for Compliant Humanoid Robots,” Proceedings of the International Conference on Intelligent Robots and Systems, 2010. [2] B.J. Stephens, “State Estimation for Force-Controlled Humanoid Balance using Simple Models in the Presence of Modeling Error,” IEEE International Conference on Robotics and Automation, 2011. [3] B.J. Stephens and C.G. Atkeson, “Push Recovery by Stepping for Humanoid Robots with Force Controlled Joints,” Proceedings of the International Conference on Humanoid Robots, 2010. [4] E.C. Whitman and C.G. Atkeson, “Control of Instantaneously Coupled Systems Applied to Humanoid Walking,” Proceedings of the IEEE International Conference on Humanoid Robots, 2010. [5] K. Yamane, S.O. Anderson, and J.K. Hodgins, “Controlling Humanoid Robots with Human Motion Data : Experimental Validation,” IEEE-RAS International Conference on Humanoid Robots, 2010, pp. 504-510. Our work now is focused on robust dynamic locomotion. Future work will also include more human-robot interaction. Behavior Libraries One of our approaches to future work will be libraries of behaviors such as the ones above. Experimental Setup and Results Full Body Control and Estimation We implement full-body force control on the humanoid robot. The combination of the high degree-of-freedom and force control make the system suitable for complex interaction tasks such as helping a person lift a table (left). To perform such tasks, we implement disturbance-modeling state estimation (right) • Hardware Platform • We implement our work on the Sarcos Primus humanoid robot. It has several unique features: • High degree of freedom • Full body force control • Located in a motion capture laboratory • Capable of human-like forces and speeds Leveraging Human Motion Capture Another technique we are using is taking human motion capture to design full body trajectories. This simplifies motion design which would otherwise be very tedious if hand-tuned. Because the robot is dynamically different from the human, we use the motion capture as a reference which the full body controller tries to imitate while coordinating other objectives such as balance and effort. We have implemented standing dance motions on the robot (right). Simple Models for Push Recovery Full body control is driven by simple models of the center of mass, angular momentum and footstep locations. Controllers are designed for these simplified models using advanced techniques such as optimal control. Our primary task is push recovery, for which we have demonstrated multiple strategies (right): ankle strategy, hip strategy and stepping.