Download
1 / 20
200 likes | 380 Views
All-Pairs Shortest Paths & Essential Subgraph. 01/25/2005 Jinil Han. Problem Description. Finding shortest paths between all pairs of vertices in a directed graph G=(V,E) with nonnegative edge weights n=|V|, m=|E|. Well-known Algorithms. Dijkstra ’ s algorithm

E N D
All-Pairs Shortest Paths & Essential Subgraph 01/25/2005 Jinil Han
Problem Description • Finding shortest paths between all pairs of vertices in a directed graph G=(V,E) with nonnegative edge weights n=|V|, m=|E|
Well-known Algorithms • Dijkstra’s algorithm running a single-source shortest paths algorithm |V| times O(n2lgn + nm), when implementing priority queue with a Fibonacci heap when all edge weights are nonnegative ** Fibonacci heap delete-min : O(lgn) priority change : O(1)
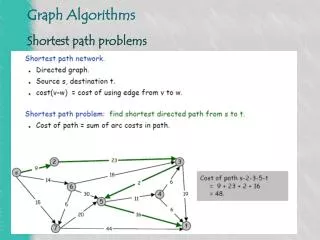
Well-known Algorithms • Bellman-Ford algorithm dj(m+1) = min {dj(m), min {dk(m), +akj}} O(n2m), O(n4) if graph is dense negative edges are allowed • Floyd-Warshall algorithm dij(k) = min {dij(k-1) , dik(k-1) + dkj(k-1)} O(n3) negative edges are allowed Now, introduce two algorithms with running time of O(n2lgn+ns)
Algorithm Outline • Run Dijkstra’s single source algorithm in parallel for all points in the graph • Discover the hidden “shortest path structure” (essential subgraph H) • Running time is equivalent to solving n single-source shortest path problems using only the edges in H O(n2lgn + ns), s = the number of edges in H • s is likely to be small in practice, for general random graph, s = O(nlgn) almost surely expected running time is O(n2lgn)
Hidden Paths Algorithm • Maintains a heap containing for each ordered pair of vertices u, v the best path from u to v found so far • At each iteration, removes a path (u~v), from top of the heap (this is the optimal path from u to v) • This path is now used to construct a set of new candidate paths • If a new candidate path (w~t) is shorter, it replaces the current best path from w to t in the heap • This maintains the optimality of the path at the top of the heap
Hidden Paths Algorithm • Example
Hidden Paths Algorithm • Running time analysis 1. the initialization step : a heap of size O(n2) 2. Step 1 & Step 2 : at most n(n-1) times at most n(n-1) delete-min operations 3. the only candidate paths created are those of the form (u,v~w) where both (u,v) and (v~w) are optimal The total number of candidate paths created is O(sn) At most one priority change operation associated with each candidate path
Hidden Path Algorithm • Running time analysis
SHORT Algorithm • Rather than iterating over nodes to solve n SSP problems, the algorithm iterates over edges and solves the SSP problem incrementally ( same as hidden Path algorithm) • It is efficient because each distance need only be computed once • The two algorithms would discover and report distances in different order • The n shortest-path trees are constructed as a by-product of SHORT but not of Hidden Path algorithm
SHORT Algorithm • Essential subgraph contain an edge (x,y) in E whenever d(x,y) =c(x,y) and there is no alternate path of equivalent cost, that is, edge (x,y) is in H when it is uniquely the shortest path in G between x and y H G
SHORT Algorithm • Think of SHORT as an algorithm for constructing H • SHORT builds H correctly (refer to a paper for proof)
SHORT Algorithm • The Search Procedure returns a decision accept or reject depending on whether an alternate path exists in the partially built subgraph Hi construct n single-source trees incrementally ** review of Dijkstra’s algorithm A shortest path tree T(v) rooted at v is built maintain a heap of fringe vertices which are not in T(v) but are adjacent to vertices in T(v) vertices are extracted from the fringe heap and added to T(v) Dijkstra-Process(v,x,y) operates on edge (x,y) when vertex x is added to T(v)
SHORT Algorithm • The Search Procedure
SHORT Algorithm • Example
SHORT Algorithm • Running time analysis for each vertex, Dijkstra-Process processes each edge of H exactly once at most n inserts, deletes, and s decrease-key operations on the fringe heap O(s + nlgn) using Fibonacci heaps The total cost is therefore O(n2lgn + ns)
s in a Random graph • To predict behavior of algorithms in practice for a large class of probability distributions on random graph, s= O(nlgn) consider dist. F on nonnegative edge weights, which doesn’t depend on n, such that F’(0) > 0 (Ex. Uniform and exponential) Th. Let G be complete directed graph, whose edge weights are chosen independently according to F. Then with probability 1-O(n-1), the diameter of G is O(lgn/n), and hence s = O(nlgn) with high probability the running time of the algorithms are O(n2lgn)
Essential Subgraph • The essential subgraph is unique and that for every pair of vertices there is a shortest path between them comprising only edges in H H is the optimal subgraph for distance computations on G • H is exactly the union of n SSP trees and H must contain a minimum spanning tree of G