Download
1 / 24
240 likes | 338 Views
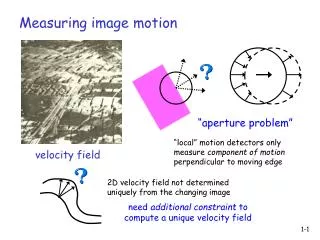
Motion from image and inertial measurements (additional slides). Dennis Strelow Carnegie Mellon University. Outline. Robust image feature tracking (in detail) Lucas-Kanade and real sequences The “smalls” tracker Motion from omnidirectional images.

E N D
Motion from image and inertial measurements (additional slides) Dennis Strelow Carnegie Mellon University
Outline Robust image feature tracking (in detail) Lucas-Kanade and real sequences The “smalls” tracker Motion from omnidirectional images Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 20052
Robust image feature tracking: Lucas-Kanade and real sequences (1) • Combining image and inertial measurements improves our situation, but… • we still need accurate feature tracking tracking • some sequences do not come with inertial measurements Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 20053
Robust image feature tracking: Lucas-Kanade and real sequences (2) • better feature tracking for improved 6 DOF motion estimation • remaining results will be image-only Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 20054
Robust image feature tracking: Lucas-Kanade and real sequences (3) • Lucas-Kanade has been the go-to feature tracker for shape-from-motion • minimizes a correlation-like matching error • using general minimization • evaluates the matching error at only a few locations • subpixel resolution Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 20055
Robust image feature tracking: Lucas-Kanade and real sequences (4) Additional heuristics used to apply Lucas-Kanade to shape-from-motion: Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 20056
Robust image feature tracking: Lucas-Kanade and real sequences (5) But Lucas-Kanade performs poorly on many real sequences… Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 20057
Robust image feature tracking: the “smalls” tracker (1) • smalls is a new feature tracker targeted at 6 DOF motion estimation • exploits the rigid scene assumption • eliminates the heuristics normally used with Lucas-Kanade • SIFT is an enabling technology here Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 20058
Robust image feature tracking: the “smalls” tracker (2) • First step: epipolar geometry estimation • use SIFT to establish matches between the two images • get the 6 DOF camera motion between the two images • get the epipolar geometry relating the two images Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 20059
Robust image feature tracking: the “smalls” tracker (3) Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200510
Robust image feature tracking: the “smalls” tracker (4) Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200511
Robust image feature tracking: the “smalls” tracker (5) • Second step: track along epipolar lines • use nearby SIFT matches to get initial position on epipolar line • exploits the rigid scene assumption • eliminates heuristic: pyramid Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200512
Robust image feature tracking: the “smalls” tracker (6) • Third step: prune features • geometrically inconsistent features are marked as mistracked and removed • clumped features are pruned • eliminates heuristic: detecting mistracked features based on convergence, error Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200513
Robust image feature tracking: the “smalls” tracker (7) • Fourth step: extract new features • spatial image coverage is the main criterion • required texture is minimal when tracking is restricted to the epipolar lines • eliminates heuristic: extracting only textured features Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200514
Robust image feature tracking: the “smalls” tracker (8) Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200515
Robust image feature tracking: the “smalls” tracker (9) left: odometry only right: images only • average error: 1.74 m • maximum error: 5.14 m • total distance: 230 m Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200516
Robust image feature tracking: the “smalls” tracker (10) • Recap: • exploits the rigid scene and eliminates heuristics • allows hands-free tracking for real sequences • can still be defeated by textureless areas or repetitive texture Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200517
Outline Robust image feature tracking (in detail) Motion from omnidirectional images Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200518
Motion from omnidirectional images (1) Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200519
Motion from omnidirectional images (2) Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200520
Motion from omnidirectional images (3) Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200521
Motion from omnidirectional images (4) Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200522
Motion from omnidirectional images (5) left: non-rigid camera right: rigid camera squares: ground truth points solid: image-only estimates dash-dotted: image-and-inertial estimates Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200523
Motion from omnidirectional images (6) • In this experiment: • omni images • conventional images + inertial • have roughly the same advantages • But in general: • inertial has some advantages that omni images alone can’t produce • omni images can be harder to use Dennis Strelow -- Motion estimation from image and inertial measurements – January 6, 200524