Download
1 / 27
270 likes | 401 Views
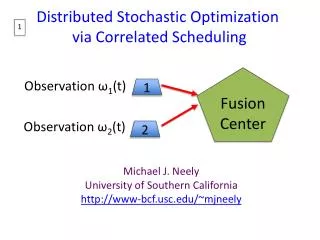
Distributed Stochastic Optimization via Correlated Scheduling. 1. Fusion Center. Observation ω 1 (t). 1. Observation ω 2 (t). 2. Michael J. Neely University of Southern California http://www-bcf.usc.edu/~mjneely. Distributed sensor reports. 2. ω 1 (t). 1. Fusion Center.

E N D
Distributed Stochastic Optimization via Correlated Scheduling 1 Fusion Center Observation ω1(t) 1 Observation ω2(t) 2 Michael J. Neely University of Southern California http://www-bcf.usc.edu/~mjneely
Distributed sensor reports 2 ω1(t) 1 Fusion Center ω2(t) 2 • ωi(t) = 0/1 if sensor i observes the event on slot t • Pi(t) = 0/1 if sensor i reports on slot t • Utility: U(t) = min[P1(t)ω1(t) + (1/2)P2(t)ω2(t),1] Redundant reports do not increase utility.
Distributed sensor reports 3 ω1(t) 1 Fusion Center ω2(t) 2 • ωi(t) = 0/1 if sensor i observes the event on slot t • Pi(t) = 0/1 if sensor i reports on slot t • Utility: U(t) = min[P1(t)ω1(t) + (1/2)P2(t)ω2(t),1] Maximize: U Subject to: P1 ≤ c P2 ≤ c
Main ideas for this example 4 • Utility function is non-separable. • Redundant reports do not bring extra utility. • A centralized algorithm would never send redundant reports (it wastes power). • A distributed algorithm faces these challenges: • Sensor 2 does not know if sensor 1 observed an event. • Sensor 2 does not know if sensor 1 reported anything.
Assumed structure 5 Agree on plan t 0 1 2 4 3 Coordinate on a plan before time 0. Distributively implement plan after time 0.
Example “plans” 6 Agree on plan t 0 1 2 4 3 • Example plan: • Sensor 1: • t=even Do not report. • t=odd Report if ω1(t)=1. • Sensor 2: • t=even Report with probp if ω2(t)=1 • t=odd: Do not report.
Common source of randomness 7 Day 1 Day 2 • Example: 1 slot = 1 day • Each person looks at Boston Globe every day: • If first letter is a “T” Plan 1 • If first letter is an “S” Plan 2 • Etc.
Specific example 8 • Assume: • Pr[ω1(t)=1] = ¾, Pr[ω2(t)=1] = ½ • ω1(t), ω2(t)independent • Power constraint c = 1/3 • Approach 1: Independent reporting • If ω1(t)=1, sensor 1 reports with probability θ1 • If ω2(t)=1, sensor 2 reports with probabilityθ2 • Optimizing θ1, θ2 gives u = 4/9 ≈ 0.44444
Approach 2: Correlated reporting 9 • Pure strategy 1: • Sensor 1 reports if and only if ω1(t)=1. • Sensor 2 does not report. • Pure strategy 2: • Sensor 1 does not report. • Sensor 2 reports if and only if ω2(t)=1. • Pure strategy 3: • Sensor 1 reports if and only if ω1(t)=1. • Sensor 2 reports if and only if ω2(t)=1.
Approach 2: Correlated reporting 10 • X(t) = iid random variable (commonly known): • Pr[X(t)=1] = θ1 • Pr[X(t)=2] = θ2 • Pr[X(t)=3] = θ3 • On slot t: • Sensors observe X(t) • If X(t)=k, sensors use pure strategy k. Optimizing θ1, θ2, θ3 gives u = 23/48 ≈ 0.47917
Summary of approaches 11 u Strategy Independent reporting Correlated reporting Centralized reporting 0.44444 0.47917 0.5
Summary of approaches 12 u Strategy Independent reporting Correlated reporting Centralized reporting 0.44444 0.47917 0.5 It can be shown that this is optimal over all distributed strategies!
General distributed optimization 13 Maximize: U Subject to: Pk ≤ c for k in {1, …, K} ω(t) = (ω1(t), …, ωΝ(t)) π(ω) = Pr[ω(t) = (ω1, …, ωΝ)] α(t) = (α1(t), …, αΝ(t)) U(t) = u(α(t), ω(t)) Pk(t) = pk(α(t), ω(t))
Pure strategies 14 A pure strategy is a deterministic vector-valued function: g(ω) = (g1(ω1), g2(ω2), …, gΝ(ωΝ)) Let M = # pure strategies: M = |A1||Ω1| x |A2||Ω2| x ... x|AN||ΩN|
Optimality Theorem 15 • There exist: • K+1 pure strategies g(m)(ω) • Probabilities θ1, θ2, …, θK+1 • such that the following distributed algorithm is optimal: • X(t) = iid, Pr[X(t)=m] = θm • Each user observes X(t) • If X(t)=m use strategy g(m)(ω).
LP and complexity reduction 16 • The probabilities can be found by an LP • Unfortunately, the LP has M variables • If (ω1(t), …, ωΝ(t)) are mutually independent and the utility function satisfies a preferred action property, complexity can be reduced • Example N=2 users, |A1|=|A2|=2 • --Old complexity = 2|Ω1|+|Ω2| • --New complexity = (|Ω1|+1)(|Ω2|+1)
Discussion of Theorem 1 17 • Theorem 1 solves the problem for distributed scheduling, but: • Requires an offline LP to be solved before time 0. • Requires full knowledge of π(ω) probabilities.
Online Dynamic Approach 18 • We want an algorithm that: • Operates online • Does not need π(ω) probabilities. • Can adapt when these probabilities change. • Such an algorithm must use feedback: • Assume feedback is a fixed delay D. • Assume D>1. • Such feedback cannot improve average utility beyond the distributed optimum.
Lyapunov optimization approach 19 • Define K virtual queues Q1(t), …, QK(t). • Every slot t, observe queues and choose strategy m in {1, …, M} to maximize a weighted sum of queues. • Update queues with delayed feedback: • Qk(t+1) = max[Qk(t) + Pk(t-D) - c, 0]
Lyapunov optimization approach 20 • Define K virtual queues Q1(t), …, QK(t). • Every slot t, observe queues and choose strategy m in {1, …, M} to maximize a weighted sum of queues. • Update queues with delayed feedback: • Qk(t+1) = max[Qk(t) + Pk(t-D) - c, 0] “service” “arrivals” Virtual queue: If stable, then: Time average power ≤ c.
Separable problems 21 • If the utility and penalty functions are a separable sum of functions of individual variables (αn(t), ωn(t)), then: • There is no optimality gap between centralized and distributed algorithms • Problem complexity reduces from exponential to linear.
Simulation (non-separable problem) 22 • 3-user problem • αn(t) in {0, 1} for n ={1, 2, 3}. • ωn(t) in {0, 1, 2, 3, 4, 5, 6, 7, 8, 9} • V=1/ε • Get O(ε) guarantee to optimality • Convergence time depends on 1/ε
Utility versus V parameter (V=1/ε) 23 Utility V (recall V = 1/ε)
Average power versus time 24 V=100 V=50 Average power up to time t V=10 power constraint 1/3 Time t
Adaptation to non-ergodic changes 26 Optimal utility for phase 2 Optimal utility for phases 1 and 3 Oscillates about the average constraint c
Conclusions 27 • Paper introduces correlated scheduling via common source of randomness. • Common source of randomness is crucial for optimality in a distributed setting. • Optimality gap between distributed and centralized problems (gap=0 for separable problems). • Complexity reduction technique in paper. • Online implementation via Lyapunov optimization. • Online algorithm adapts to a changing environment.