Download
1 / 24
240 likes | 393 Views
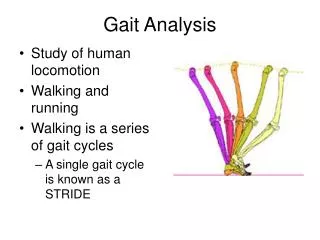
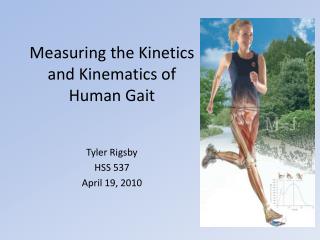
2-D Comparative Gait Kinematics Using a Single Video Camera and EMG Signal Analysis. GUIDED BY Mr. Chaitanya Srinivas L.V. Sujeet Blessing Assistant Professor 08MBE026 SBST VIT University VIT University Vellore Vellore . SUMMARY OF WORK.

E N D
2-D Comparative Gait Kinematics Using a Single Video Camera and EMG Signal Analysis GUIDED BY Mr. ChaitanyaSrinivas L.V.Sujeet Blessing Assistant Professor 08MBE026 SBST VIT University VIT University Vellore Vellore
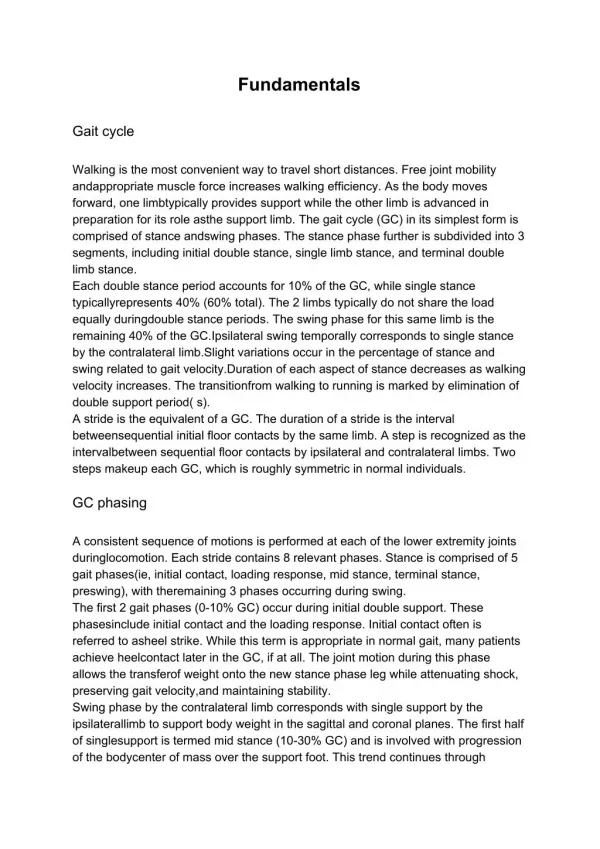
SUMMARY OF WORK • Acquisition and Processing of EMG for six subjects from nine muscles • Stride analysis for six subjects • Kinematics analysis for six subjects • Marker based automated video-graphic analysis • Marker-less automated video-graphic analysis
EMG ANALYSIS • EMG acquisition • EMG processing • Linear envelope • Normalization using Maximum Voluntary Contraction • Wave rectification • Butterworth low pass filter • Integrated EMG • Output from Low pass filter is passed through an integrator • Root mean square
µ volts µ volts µ volts Biceps Femoris Vastus Medialis Vastus Lateralis µ volts µ volts µ volts Semi Tendinosus Rectus Femoris Medial Gastrocnemius µ volts µ volts µ volts Lateral Gastrocnemius Soleus Tibialis Anterior Linear envelope of EMG during one gait cycle Normal
µ volts µ volts
STRIDE ANALYSIS Stride analysis – Paper-Ink Method Step length, Stride length, Cadence, Stride width, Velocity, Foot progression angle
KINEMATIC ANALYSIS • The motion of objects without consideration of the causes leading to the motion • Determinants of position • Active – EMG • Passive – Force
MARKER TECHNIQUE • Helen Hayes marker set • Distance from Camera – 9 feet • Camera captures 25 frames/second • Image processing • Colour image to binary image • Blob detection • Drawing line, connecting respective markers • Line and angle detection using Hough’s transform Pics Results
MARKER-LESS TECHNIQUE • Converting into silhouette video • Extraction of the silhouette • Segmenting leg into thigh, shin and foot using manual measurements • Finding mid points of these segments, which serves as markers • Correlating these markers with the un-segmented body • Drawing lines connecting these markers • Detecting lines and angles using Hough’s transform Pics Results
Video MARKER TECHNIQUE Frame ‘n’ Colour image Binary image Blob detection Draw lines Draw lines Hough’s Transform Hough’s Transform Hip angle Knee angle Video
Video (in RGB) MARKER-LESS TECHNIQUE Silhouette extraction Frame ‘n’ Stance Phase Algorithm Swing Phase Algorithm Segmentation and Detection of Markers Adjusting Leg Shortening using extraction Drawing Lines Segmentation and Detection of Markers Angle Detection Drawing Lines Angle Detection Video
COMPARISON • Marker-less technique has a wide range of hip angle • Knee flexion angle during heel strike is not clearly seen in marker-less technique, however, during swing phase, it has a good range Normal
CONCLUSION • Stride analysis was carried out using paper-ink method • Emg was acquired from nine muscles from six subjects, processed and averaged • Kinematic analysis was done on the same six subjects • Marker and Marker-less automated video-graphic techniques were developed and the results were compared
REFERENCE • Richard Baker,“Gait analysis methods in rehabilitation”, Journal of NeuroEngineering and Rehabilitation, 2006, 3:4. • Mary M. Rodgers, “Dynamic biomechanics of the normal foot and ankle during walking and running”, Physical Therapy, 1988, 1822-30. • Michela Goffredo, Imed Bouchrika, John N. Carter and Mark S. Nixon, “Performance analysis for gait in camera networks”, Association of Computing Machinery, 2008, 73-80. • Y.P. Ivanenko, R.E. Poppele and F. Lacquaniti, “Five basic muscle activation patterns account for muscle activity during human locomotion”, American Journal of Physiology, 2004, 267-282. • M.B.I. Reaz, M.S. Hussain and F. Mohd-Yasin, “Techniques of EMG signal analysis: Detection, processing, classification and applications”, Biological Procedures, 2006, 8(1): 11-35. • Noraxon EMG and Sensor System, “Clinical SEMG Electrode Sites.” www.noraxon.com. • Helen Hayes Marker System, www.helenhayeshospital.org.
MARKER BASED VIDEO-GRAPHIC TECHNIQUE Back HIP ANGLE KNEE ANGLE MARKER-LESS VIDEO-GRAPHIC TECHNIQUE Back HIP ANGLE KNEE ANGLE
MUSCLES • Lateral gastrocnemius, Medial gastrocnemius, Vastus lateralis, Vastus medialis, Rectus femoris, Biceps femoris, Semi tendinosus, Soleus, Tibialis anterior Back
SOLEUS LG MG TA RF VL Back VM µ volts % Stride BF ST Data Taken From Winter (1991) Normal Hip Angle Normal Knee Angle Back
a – one frame of an original video; b – grey image; c, d – binary image; e – blob detection; f – for hip angle estimation; g – for knee angle estimation; h – detected lines by Hough’s transform for hip angle; i – detected lines by Hough’s transform for knee angle Back
h i a – Silhouette of a original frame; b – image extracted from d – negative image; e – correlating the manual the hip; c – extracting only the subject from the background; measurements with the pixel values; f – shin; g – upper leg; h – drawing lines connecting the markers; i – detected lines using Hough’s transform BACK