Download
1 / 20
200 likes | 347 Views
Why Is Full Remote Handling an Area of Unfilled DEMO R&D Gap? Tom Burgess for NCT Discussion Group. What Is Full Remote Handling, required by Demo?

E N D
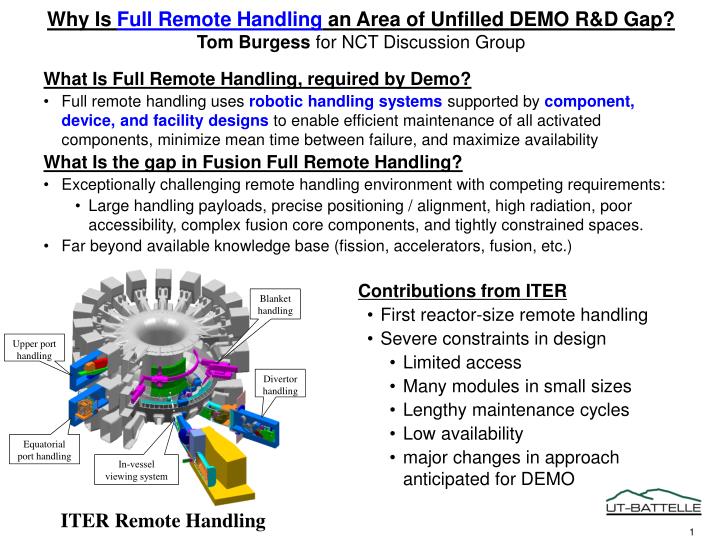
Why Is Full Remote Handling an Area of Unfilled DEMO R&D Gap? Tom Burgess for NCT Discussion Group • What Is Full Remote Handling, required by Demo? • Full remote handling uses robotic handling systemssupported bycomponent, device, and facility designs to enable efficient maintenance of all activated components, minimize mean time between failure, and maximize availability • What Is the gap in Fusion Full Remote Handling? • Exceptionally challenging remote handling environment with competing requirements: • Large handling payloads, precise positioning / alignment, high radiation, poor accessibility, complex fusion core components, and tightly constrained spaces. • Far beyond available knowledge base (fission, accelerators, fusion, etc.) • Contributions from ITER • First reactor-size remote handling • Severe constraints in design • Limited access • Many modules in small sizes • Lengthy maintenance cycles • Low availability • major changes in approach anticipated for DEMO
A NCT Facility Fills this Gap in Unique Ways • Envisioned NCT Challenges and Capabilities • Must achieve an availability of 30%, an order of magnitude above ITER goal • Demo-level high radiation • Frequent scheduled and unscheduled component exchanges • High degree of component modularization • Time and cost effective solutions • Vertical Access:CTF Vertical May 31, 2007.avi • Mid-plane Access: CTF Midplane May 16, 2007.avi
Fission Reactor Remote Handling is Simple by Comparison Power Reactor Fuel Handling ORNL High Flux Isotope Reactor Fuel Pool
Spallation Neutron Source Target Facility: A Modern, Accelerator-based Example SNS Target Facility Cutaway of Target Building
SNS Target Process Hot Cell A US science frontier facility Size: 103 Ft Long x 14 ft Wide x 30 feet High
An inaccessible area where all process systems are fully remotely maintained with state-of-the-art robotic remote handling system SNS Hot Cell Interior Looking Towards Target
Remote Handling Design Development for Rare Isotope Accelerator (RIA) • ORNL in collaboration with ANL, LLNL and MSU, developed the conceptual design of RIA target stations and facilities • Sponsored by DOE Office of Science - Nuclear Physics • Accelerates ion beams from hydrogen through uranium at power levels up to 400 kW with primary targets of liquid lithium and water-cooled tungsten • RIA R&D and design was completed in 2006. DOE has rescoped and defined as the Facility for Rare Isotope Beams (FRIB), with ~ 5 year delay in construction schedule.
Remote Handling Design Development for Archimedes Filter Plant Archimedes Nuclear Waste, LLC, is developing a proprietary process for plasma mass separation of HLW stored at DOE-Hanford • Archimedes Filter Plant will reduce HLW mass by 75% to 90% • Remote Systems completed tasks: • Trade-off Study to evaluate and select the optimum remote handling approach for the multi-filter plant • Conceptual Design and Cost Est. of the AFP Remote Handling System and supporting documents AFP Remote Handling System Concept Design
Back-up SlidesNCT Component Test Facility (CTF) Remote Handling Specific
Blanket handling Upper port handling Divertor handling Equatorial port handling In-vessel viewing system CTF Builds On ITER Remote Maintenance Approach • ITER remote handling (RH) design and experience leveraged and applied • Hands-on maintenance employed to the fullest extent possible • Activation levels outside vacuum vessel low enough to permit hands-on maintenance ITER Remote Handling Systems
Machine Assembly / Disassembly Schematic Centerstack Assembly Upper Blanket Assy Lower Blanket Assy Upper PF coil Upper Diverter Lower Diverter Lower PF coil Upper Piping Electrical Joint Top Hatch Shield Assembly NBI Liner Test Modules • Disconnect upper piping • Remove sliding electrical joint • Remove top hatch • Remove upper PF coil • Remove upper diverter • Remove lower diverter • Remove lower PF coil • Extract NBI liner • Extract test modules • Remove upper blanket assembly • Remove lower blanket assembly • Remove shield assembly • Remove centerstack assembly
CTF Vacuum Vessel, Blanket and Port Assembly Shielding Allows Ex-Vessel Hands-on Access VV, blanket and port shielding (steel & water)
Activated Components Transferred Between Machine and Service Hot Cell by RH Casks Midplane Port RH Cask • In-vessel components removed as integral assemblies and transferred to hot cell for repair or processing as waste • In-vessel contamination controlled and contained by sealed transfer casks that dock to VV ports • Remote operations begin with hands-on disassembly and preparation of VV closure plate at midplane port or top vertical port • Midplane ports provide access to test blanket modules, heating, and diagnostic systems housed in standard shielded assemblies that are remotely removed Test Blanket Module Cask Docking Ports Hot Cell
To reduce maintenance time / significantly increase machine availability (30 % duty factor), a large in-vessel component module approach with vertical replacement is being investigated. Top Vertical Port Facilitates Large Component Replacement To Minimize Maintenance Time
Remote maintenance is an important design and interface requirement, particularly for frequently handled items • Components are given a classification to guide the level of design optimization for ease and speed of replacement Remote Handling Classification of Components
Component Maintenance Frequency and Time Estimate * Includes active remote maintenance time only. Actual machine shutdown period will be longer by ~ > 1 month. Time estimates are rough approximations based on similar operations estimated for ITER and FIRE.
Port assembly installed Port assembly removed to cask TF PF Cryostat Blanket Port assembly RH tractor Port bellows VV Port assembly and RH cask interface to VV RH cask VV port ITER equatorial port assembly remote handling system
Port assembly and RH cask interface requires > 50 cm clearance measured from nearest component to inside port opening 60 cm • Space drivers: • Cask maneuvering clearance • Cask enclosure wall • Cask-to-port seals • & docking clamps (not shown) • Double-seal door seals • Port assembly seal welds • Port assembly attachment keys Note: Design has been optimized to minimize space, requires R&D to verify, and is subject to increases 60 cm ITER VV port access clearance requirements