Download
1 / 15
190 likes | 327 Views
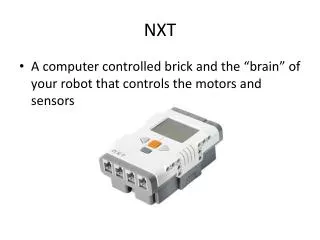
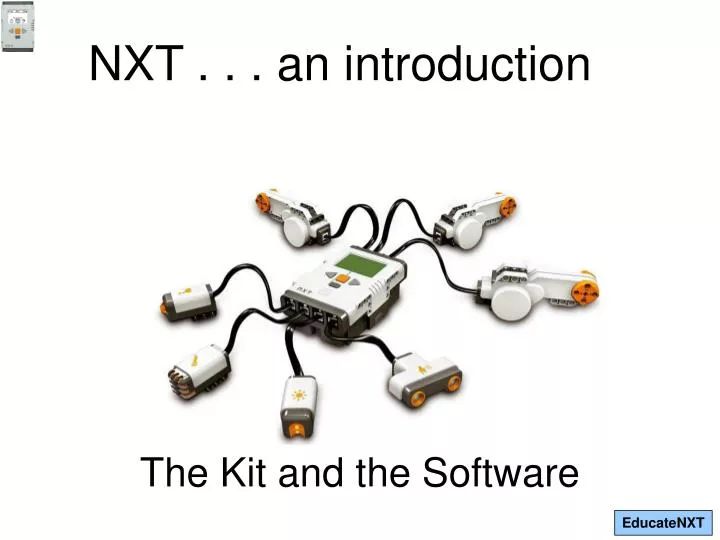
NXT . . . an introduction. The Kit and the Software. A B C USB. The Brick. Output Ports A, B, and C Three separate motor ports. Input ports 1, 2, 3, and 4 Where sensors are attached. 1 2 3 4 . The Brick. Select Buttons. On and Enter. Back and Off.

E N D
NXT . . . an introduction The Kit and the Software
A B C USB The Brick Output Ports A, B, and C Three separate motor ports Input ports 1, 2, 3, and 4 Where sensors are attached 1 2 3 4
The Brick Select Buttons On and Enter Back and Off
The Brick Bluetooth < switched on <> connected Name of the brick Battery level (full) Icon selections
Sensors Light Sensor Detects the surrounding light intensity (not color) between 0 – 100%. The Light Sensor can generate it’s own light (Ideal for line following). To allow this to happen the “Generate light” box in the Light sensor block configuration panel needs to be ticked.
Sensors Ultrasonic Sensor Allows a robot to detect the distance to objects and walls. It has a range of 0 – 255cm. It works by sending out and receiving sound waves. Similar to the echo sounding used by bats. Harder objects will return more accurate readings than softer objects which can absorb the sound waves.
Sensors Sound Sensor The Sound Sensor gives readings of Sound Pressure in Decibels (dB) or Adjusted Decibels (dBA). For the Mindstorms NXT, the readings are presented as Percentages (%). 0-5% Silence/Whispering. 5-10% Normal classroom noise. 10-25% Talking to sensor as a microphone. 25-100% Loud noise/music. Note: dB – Sounds beyond our hearing range dBA – adjusted to our hearing range
Sensors Touch Sensor The Touch Sensor can respond to being pressed, released or bumped. As shown on the Touch sensor block configuration panel Extra pieces can be added to the front of the Touch sensor to make a bigger bumper.
“Complete” Block menu NXT Window – Access Brick info. (e.g., memory, battery, and so on) NXT-G Software Main Working Space “Common” Block menu Accessed here
Starting point Add Program blocks here. Download and run immediately NXT-G Software Main Working Space Download (Run from the brick)
Robot Educator A series of 46 lessons split into: Common – Easier (20) Complete – Harder (19) Data Logging – Mixed (7) Each lesson includes: Challenge Brief – Video or slides Building Instructions Programming Instructions
Pointer and Selection Tool (default) Written comments can be added. Grab Hand to move the work space around.
Some commonly used blocks Sound Move Display Wait For Touch Switch (Touch)
Placing Blocks on the working space Drag (left-click) block here. Release when the white position preview marks appear. Change the settings in the Configuration panel.