Download
1 / 12
120 likes | 212 Views
Wiwat Ruengmee ICS 280 Special Topic in Ubiquitous Computing Ubiquitous Computing for Post-Crisis Logistics 01/26/2006. Data Fusion of Four ABS Sensors and GPS for an Enhanced Localization of Car-like Vehicles. by Philippe Bonnifait, Pascal Bouron, Paul Crubille, and Dominique Meizel.

E N D
Wiwat Ruengmee ICS 280 Special Topic in Ubiquitous Computing Ubiquitous Computing for Post-Crisis Logistics 01/26/2006 Data Fusion of Four ABS Sensors and GPS for an Enhanced Localization of Car-like Vehicles by Philippe Bonnifait, Pascal Bouron, Paul Crubille, and Dominique Meizel
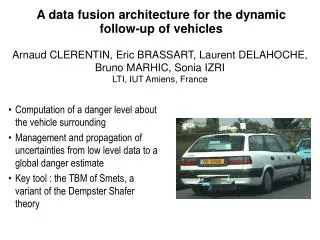
Motivations / Problems Wide availability of GPS and ABS systems in modern cars. GPS suffers from satellite masks. Classical solutions to satellite masks problem of GPS are an odometer, a gyro, and a magnetic compass. Implement and test the localization system using GPS, ABS sensors, and a driving wheel encoder. Improve the precision due to the redundancy of measurements. Odometry versus Dead Reckoning. This paper presents a new odometric technique and the data fusion using Extended Kalman Filter (EKF) to estimate the localization.
Approach (1) Odometric technique using data from 4 ABS sensors together with a driving wheel encoder. Basics Displacement between two samples How to estimate ∆ and ω? using the steering wheel ψand the distances travelled by each wheel
Approach (3) Differential odometry estimation and their estimation • Non-linearity leads to use of Extended Kalman Filter (EKF). • Each (5) estimation of (∆, ω) to provide an odometric location is called “odometric EKF.”
Approach (4) Sampling is performed when: Each time a GPS measurement is performed. Each time the car has travelled one meter and the steering angle has changed more than 0.5 degree. Sampling frequency is not constant and higher than 1 Hz
Architecture of localization system GPS “1PPS” signal (x, y) (x, y, Φ) P ABS Computer + Steering Angle Odometric EKF Localiser EKF ζ S v ζ = An estimation S = Covariance matrix
Results of Sensor Fusion Of GPS and Odemetry Experiments: 9.6 km long course Three characteristics: normal operation seven small GPS masks of ten seconds Large masks of 5 minutes Use of all the ABS sensors increases the precision of the positioning system.